用调制信号取控制载波信号的参数的过程.
其中m(t)为调制信号,根据调制信号的不同,可分为模拟调制和数字调制.
c(t)为载波信号,通常有连续载波和脉冲载波两种.连续载波又有调幅,调频,调相三种调制方式.
sm (t)为已调信号.根据调制前后,调制信号的频谱是否发生线性变化,可分为线性调制和非线性调制.
由调制信号控制载波信号的幅度.使载波信号的幅度按调制信号的规律发生变化,所以幅度调制的已调信号一般可以写为
s
m
(
t
)
=
A
m
(
t
)
cos
ω
c
t
s_m(t)=Am(t)\cos\omega_ct
s m ( t ) = A m ( t ) cos ω c t
S
m
(
ω
)
=
A
2
[
M
(
ω
−
ω
c
)
+
M
(
ω
+
ω
c
)
]
S_m(\omega)=\frac A2[M(\omega-\omega_c)+M(\omega+\omega_c)]
S m ( ω ) = 2 A [ M ( ω − ω c ) + M ( ω + ω c ) ]
在调制前后,基带信号的频谱 只发生了线性变化,因此幅度调制也可以称为线性调制.
标准调幅.将基带信号变为直流信号后进行幅度调制.
叠加直流分量后与载波函数相乘,所得已调信号时域表达为
s
A
M
(
t
)
=
(
A
0
+
m
(
t
)
)
cos
(
ω
c
t
)
s_{AM}(t)=(A_0+m(t))\cos(\omega_c t)
s A M ( t ) = ( A 0 + m ( t ) ) cos ( ω c t )
由于在叠加直流分量后,m(t)应为直流信号,所以要求
m
a
x
{
∣
m
(
t
)
∣
}
≤
A
0
max\left\{ |m(t)| \right\} \leq A_0
m a x { ∣ m ( t ) ∣ } ≤ A 0
S
A
M
(
ω
)
=
π
A
0
[
δ
(
ω
−
ω
c
)
+
δ
(
ω
+
ω
c
)
]
+
1
2
[
M
(
ω
−
ω
c
)
+
M
(
ω
+
ω
c
)
]
S_{AM}(\omega)=\pi A_0[\delta(\omega-\omega_c)+\delta(\omega+\omega_c)]+\frac12 [M(\omega-\omega_c)+M(\omega+\omega_c)]
S A M ( ω ) = π A 0 [ δ ( ω − ω c ) + δ ( ω + ω c ) ] + 2 1 [ M ( ω − ω c ) + M ( ω + ω c ) ]
关于调制信号的描述
根据图像不难看出,已调信号的带宽BAM 为调制信号带宽fH 的两倍
B
A
M
=
2
f
H
B_{AM}=2f_H
B A M = 2 f H
P
A
M
=
A
0
2
2
+
m
2
(
t
)
ˉ
2
=
P
c
+
P
s
P_{AM}=\frac {A_0^2}2+\frac{\bar{m^2(t)}}2 \\ =P_c+P_s
P A M = 2 A 0 2 + 2 m 2 ( t ) ˉ = P c + P s c 为载波功率,Ps 为边带功率.
调制效率
η
A
M
=
P
s
P
A
M
\eta_{AM}=\frac {P_s}{P_{AM}}
η A M = P A M P s
A
m
cos
ω
m
t
A_m\cos\omega_mt
A m cos ω m t
η
A
M
=
A
m
2
2
A
0
2
+
A
m
2
\eta_{AM}=\frac{A^2_m}{2A^2_0+A^2_m}
η A M = 2 A 0 2 + A m 2 A m 2
A
0
=
A
m
A_0=A_m
A 0 = A m
这样调制后,效率有限,而且由于已调信号的带宽增加,也导致传输频率上的浪费.
但在解调仅需要包络检波即可恢复信号,解调实现非常简单.
//链接包络检波
双边带调制.与AM相比,不再叠加直流分量,此时已调信号的时域表达
s
D
S
B
(
t
)
=
m
(
t
)
cos
ω
c
t
s_{DSB}(t)=m(t)\cos \omega_c t
s D S B ( t ) = m ( t ) cos ω c t
S
D
S
B
(
ω
)
=
1
2
[
M
(
ω
−
ω
c
)
+
M
(
ω
+
ω
c
)
]
S_{DSB}(\omega)=\frac 12[M(\omega-\omega_c)+M(\omega+\omega_c)]
S D S B ( ω ) = 2 1 [ M ( ω − ω c ) + M ( ω + ω c ) ]
较AM相比,DSB由于不再叠加直流分量,使调制效率大大增加.
但相对的在解调时不能使用包络检波,同时调制后频带拓宽仍致使带宽资源浪费.
单边带调制.由于带限信号的频谱是对称的,因此在理论上,仅发送半个频谱信息就可以复原基带信号.
这样又进一步节约带宽资源,但相应的在制作上要复杂许多.
在DSB的基础上通过滤波器,保留上边带(USB)或下边带(LSB).
实际中滤波器并不具备理想滤波器这样陡峭的边界,滤波器截至特性越好就越贵.
残留边带调制.在适当增加带宽的条件下,优化对SSB中滤波器的要求.
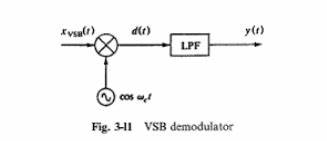
VSB中不再要求严格的截至特性,而是需要具有互补对称性,即相隔
2
ω
c
2\omega_c
2 ω c
证明如下:
根据VSB调制过程可知,未经LPF信号s(t)
s
(
t
)
=
s
V
S
B
(
t
)
⋅
2
cos
ω
c
t
s(t)=s_{VSB}(t)\cdot 2\cos \omega_ct
s ( t ) = s V S B ( t ) ⋅ 2 cos ω c t KaTeX parse error: No such environment: align at position 8: \begin{̲a̲l̲i̲g̲n̲}̲ S(\omega)&=\fr…
H
(
ω
)
H(\omega)
H ( ω )
S
m
(
ω
)
=
H
(
ω
)
[
S
V
S
B
(
ω
+
ω
c
)
+
S
V
S
B
(
ω
−
ω
c
)
]
S_m(\omega)=H(\omega)[S_{VSB}(\omega+\omega_c)+S_{VSB}(\omega-\omega_c)]
S m ( ω ) = H ( ω ) [ S V S B ( ω + ω c ) + S V S B ( ω − ω c ) ]
R
(
t
)
=
s
m
(
t
)
⋅
2
cos
ω
c
t
R(t)=s_m(t) \cdot 2\cos \omega_c t
R ( t ) = s m ( t ) ⋅ 2 cos ω c t KaTeX parse error: No such environment: align at position 8: \begin{̲a̲l̲i̲g̲n̲}̲ R(\omega)&=\fr…
R
(
ω
)
=
S
V
S
B
(
ω
)
[
H
(
ω
+
ω
c
)
+
H
(
ω
−
ω
c
)
]
R(\omega)=S_{VSB}(\omega)[H(\omega+\omega_c)+H(\omega-\omega_c)]
R ( ω ) = S V S B ( ω ) [ H ( ω + ω c ) + H ( ω − ω c ) ]
H
(
ω
+
ω
c
)
+
H
(
ω
−
ω
c
)
=
C
o
n
s
t
a
n
t
H(\omega+\omega_c)+H(\omega-\omega_c) = Constant
H ( ω + ω c ) + H ( ω − ω c ) = C o n s t a n t
适用于所有线性调制.
相干解调时,为了无失真还原基带信号,接受端必须提供一个与接受的已调信号严格同步的本地载波,它与已调信号相乘后,经过LPF取出低频分量,即可还原基带信号
恢复载波相位对解调影响:
不考虑信道乘性噪声干扰,则对于接受端信号为
s
(
t
)
=
A
c
m
(
t
)
cos
(
2
π
f
c
t
+
ϕ
c
)
s(t)= A_c m(t) \cos(2\pi f_c t +\phi_c)
s ( t ) = A c m ( t ) cos ( 2 π f c t + ϕ c )
ϕ
\phi
ϕ KaTeX parse error: No such environment: align at position 8: \begin{̲a̲l̲i̲g̲n̲}̲ r(t)\cos(2\pi …
y
o
(
t
)
=
A
c
2
m
(
t
)
cos
(
ϕ
c
−
ϕ
)
y_o(t)=\frac{A_c}{2}m(t)\cos(\phi_c-\phi)
y o ( t ) = 2 A c m ( t ) cos ( ϕ c − ϕ )
ϕ
c
\phi_c
ϕ c
ϕ
\phi
ϕ
Δ
ϕ
\Delta \phi
Δ ϕ
Δ
ϕ
=
π
2
\Delta \phi= \frac{\pi}{2}
Δ ϕ = 2 π
Δ
ϕ
=
0
\Delta \phi= 0
Δ ϕ = 0
包络:我们可以将任一平稳窄带高斯随机过程X(t)表示为标准正态振荡的形式
A
(
t
)
cos
(
ω
t
+
ϕ
(
t
)
)
A(t)\cos(\omega t + \phi(t))
A ( t ) cos ( ω t + ϕ ( t ) )
首先通过整流器,被整流信号通过LPF即可恢复原基带信号
在理想状态下,包络检波器的输出为
y
o
(
t
)
=
g
1
+
g
2
m
(
t
)
y_o(t)=g_1+g_2m(t)
y o ( t ) = g 1 + g 2 m ( t )
s
m
(
t
)
s_m(t)
s m ( t )
n
(
t
)
n(t)
n ( t )
s
m
(
t
)
s_m(t)
s m ( t )
n
i
(
t
)
n_i(t)
n i ( t )
m
o
(
t
)
m_o(t)
m o ( t )
n
o
(
t
)
n_o(t)
n o ( t )
Ps:BPF的作用为滤除带外噪声
解调器输出有用信号的平均功率与输出噪声平均功率之比
S
o
N
o
=
m
o
2
(
t
)
‾
n
o
2
(
t
)
‾
\frac{S_o}{N_o}=\frac{\overline{m_o^2(t)}}{\overline{n_o^2(t)}}
N o S o = n o 2 ( t ) m o 2 ( t )
对于不同形式的
s
m
(
t
)
s_m(t)
s m ( t ) 单边 功率谱密度为
n
0
n_0
n 0
N
i
=
n
0
B
N_i= n_0 B
N i = n 0 B
输出信噪比与输入信噪比的比值
G
=
S
o
/
N
o
S
i
/
N
i
G=\frac{S_o / N_o}{S_i / N_i}
G = S i / N i S o / N o
输出信号平均功率:
1
4
m
2
(
t
)
‾
\frac 14 \overline{m^2(t)}
4 1 m 2 ( t )
1
4
n
0
B
\frac 14 n_0B
4 1 n 0 B
S
o
N
o
=
m
2
(
t
)
‾
n
0
B
\frac {S_o}{N_o}=\frac{\overline{m^2(t)}}{n_0B}
N o S o = n 0 B m 2 ( t )
S
i
N
i
=
1
2
m
2
(
t
)
‾
n
0
B
\frac{S_i}{N_i}=\frac{\frac 12 \overline{m^2(t)}}{n_0B}
N i S i = n 0 B 2 1 m 2 ( t )
G
=
2
G=2
G = 2
具体计算流程:
设调制信号为
m
(
t
)
c
o
s
2
π
f
c
t
m(t)cos 2\pi f_ct
m ( t ) c o s 2 π f c t
m
o
(
t
)
=
1
2
m
(
t
)
m_o (t) =\frac 12 m(t)
m o ( t ) = 2 1 m ( t )
S
o
=
1
4
m
(
t
)
‾
2
S_o = \frac 14 \overline{m(t)}^2
S o = 4 1 m ( t ) 2
再考虑噪声通过相干解调后的情况:
n
i
(
t
)
=
n
c
(
t
)
cos
2
π
f
c
t
−
n
s
(
t
)
sin
2
π
f
c
t
n_i(t)=n_c(t)\cos 2\pi f_ct -n_s(t)\sin 2\pi f_c t
n i ( t ) = n c ( t ) cos 2 π f c t − n s ( t ) sin 2 π f c t
1
2
n
c
(
t
)
+
1
2
n
c
(
t
)
cos
2
π
⋅
2
f
c
t
−
1
2
n
s
(
t
)
sin
2
π
⋅
2
f
c
t
\frac 12n_c(t) + \frac 12n_c(t)\cos 2\pi\cdot2f_ct-\frac 12 n_s(t)\sin2\pi\cdot 2f_c t
2 1 n c ( t ) + 2 1 n c ( t ) cos 2 π ⋅ 2 f c t − 2 1 n s ( t ) sin 2 π ⋅ 2 f c t
n
o
(
t
)
=
1
2
n
c
(
t
)
n_o(t)=\frac 12n_c(t)
n o ( t ) = 2 1 n c ( t )
N
o
=
1
4
n
c
(
t
)
‾
2
=
1
4
n
0
B
N_o=\frac 14 \overline{n_c(t)}^2=\frac 14n_0B
N o = 4 1 n c ( t ) 2 = 4 1 n 0 B
S
o
N
o
=
m
(
t
)
‾
2
n
0
B
\frac{S_o}{N_o}=\frac{\overline{m(t)}^2}{n_0B}
N o S o = n 0 B m ( t ) 2
S
i
N
i
=
1
2
m
(
t
)
‾
2
n
0
B
\frac {S_i}{N_i}=\frac {\frac 12 \overline{m(t)}^2}{n_0B}
N i S i = n 0 B 2 1 m ( t ) 2
输出信号平均功率:
1
4
m
2
(
t
)
‾
\frac 14 \overline{m^2(t)}
4 1 m 2 ( t )
1
4
n
0
B
\frac 14 n_0B
4 1 n 0 B
S
o
N
o
=
m
2
(
t
)
‾
4
n
0
B
\frac{S_o}{N_o}=\frac{\overline{m^2(t)}}{4n_0B}
N o S o = 4 n 0 B m 2 ( t )
S
i
N
i
=
m
2
(
t
)
‾
4
n
0
B
\frac{S_i}{N_i}=\frac{\overline{m^2(t)}}{4n_0B}
N i S i = 4 n 0 B m 2 ( t )
G
=
1
G=1
G = 1
具体计算流程:
不能单单从制度增益比较两种调制方式,考虑到二者带宽,输入信号功率不同,这样的比较是不合理的.
若在相同条件下比较.二者抗噪能力基本近似
已知输入信号KaTeX parse error: No such environment: align at position 8: \begin{̲a̲l̲i̲g̲n̲}̲ s_m(t)+n_i(t) …
E
(
t
)
=
[
A
0
+
m
(
t
)
+
n
c
(
t
)
]
2
+
n
s
2
(
t
)
E(t) = \sqrt{[A_0+m(t)+n_c(t)]^2+n_s^2(t)}
E ( t ) = [ A 0 + m ( t ) + n c ( t ) ] 2 + n s 2 ( t )
S
i
=
A
0
2
2
+
m
2
(
t
)
‾
2
S_i = \frac{A_0^2}{2} + \frac{\overline{m^2(t)}}{2}
S i = 2 A 0 2 + 2 m 2 ( t )
N
i
=
n
0
B
N_i = n_0 B
N i = n 0 B
对于输出的包络信号,现考虑输入信噪比的两种情况:
大信噪比
[
A
0
+
m
(
t
)
]
≫
n
c
2
(
t
)
+
n
s
2
(
t
)
[A_0+m(t)] \gg \sqrt{n_c^2(t)+n_s^2(t)}
[ A 0 + m ( t ) ] ≫ n c 2 ( t ) + n s 2 ( t )
计算:
此时输出信号功率:
S
o
=
m
2
(
t
)
‾
S_o=\overline{m^2(t)}
S o = m 2 ( t )
输出噪声功率:
N
o
=
n
0
B
N_o=n_0B
N o = n 0 B
输出信噪比
S
o
N
o
=
m
2
(
t
)
‾
n
0
B
\frac{S_o}{N_o}=\frac{\overline{m^2(t)}}{n_0B}
N o S o = n 0 B m 2 ( t )
G
A
M
=
2
m
2
(
t
)
‾
A
0
2
+
m
2
(
t
)
G_{AM}=\frac{2\overline{m^2(t)}}{A_0^2+m^2(t)}
G A M = A 0 2 + m 2 ( t ) 2 m 2 ( t )
A
0
=
∣
m
(
t
)
∣
m
a
x
A_0= |m(t)|_{max}
A 0 = ∣ m ( t ) ∣ m a x
2
3
\frac23
3 2
小信噪比
[
A
0
+
m
(
t
)
]
≪
n
c
2
(
t
)
+
n
s
2
(
t
)
[A_0+m(t)] \ll \sqrt{n_c^2(t)+n_s^2(t)}
[ A 0 + m ( t ) ] ≪ n c 2 ( t ) + n s 2 ( t )
E
(
t
)
=
R
(
t
)
+
[
A
0
+
m
(
t
)
]
cos
θ
(
t
)
E(t)=R(t)+[A_0+m(t)]\cos \theta(t)
E ( t ) = R ( t ) + [ A 0 + m ( t ) ] cos θ ( t )
输出噪声功率:
N
o
=
n
0
B
N_o=n_0B
N o = n 0 B
输出信噪比
S
o
N
o
=
m
2
(
t
)
‾
n
0
B
\frac{S_o}{N_o}=\frac{\overline{m^2(t)}}{n_0B}
N o S o = n 0 B m 2 ( t )
G
A
M
=
2
m
2
(
t
)
‾
A
0
2
+
m
2
(
t
)
G_{AM}=\frac{2\overline{m^2(t)}}{A_0^2+m^2(t)}
G A M = A 0 2 + m 2 ( t ) 2 m 2 ( t )
A
0
=
∣
m
(
t
)
∣
m
a
x
A_0= |m(t)|_{max}
A 0 = ∣ m ( t ) ∣ m a x
2
3
\frac23
3 2
小信噪比
[
A
0
+
m
(
t
)
]
≪
n
c
2
(
t
)
+
n
s
2
(
t
)
[A_0+m(t)] \ll \sqrt{n_c^2(t)+n_s^2(t)}
[ A 0 + m ( t ) ] ≪ n c 2 ( t ) + n s 2 ( t )
E
(
t
)
=
R
(
t
)
+
[
A
0
+
m
(
t
)
]
cos
θ
(
t
)
E(t)=R(t)+[A_0+m(t)]\cos \theta(t)
E ( t ) = R ( t ) + [ A 0 + m ( t ) ] cos θ ( t )
当输入信噪比小于一定程度时,输出信噪比急剧下降,这一现象被称为门限效应 ,开始出现门限效应的输入信噪比值称为门限值.
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-jFVPzWN8-1578228355589)(Q:\WorkSpace\course\communication_principle\picture\analog_modulation\调制模型.png)]](https://img-blog.csdnimg.cn/20200105204615136.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3doaXRlXzE1Ng==,size_16,color_FFFFFF,t_70)

![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-UILwzjgH-1578228355591)(Q:\WorkSpace\course\communication_principle\picture\analog_modulation\AM_time.jpg)]](https://img-blog.csdnimg.cn/20200105204646504.jpg)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-IJkRdKHc-1578228355593)(Q:\WorkSpace\course\communication_principle\picture\analog_modulation\AM_frequence.png)]](https://img-blog.csdnimg.cn/20200105204656393.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3doaXRlXzE1Ng==,size_16,color_FFFFFF,t_70)

![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-QPhxwlBY-1578228355597)(/SSB.jpg)]](https://img-blog.csdnimg.cn/20200105204714920.jpg)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-p8VvaaCl-1578228355602)(/SSB_filter.jpg)]](https://img-blog.csdnimg.cn/20200105204725227.jpg?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3doaXRlXzE1Ng==,size_16,color_FFFFFF,t_70)

![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-x1k1aqEQ-1578228355606)(/Spectrum-of-VSB-signal.png)]](https://img-blog.csdnimg.cn/20200105204803974.png)

![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-y7ABJYWW-1578228355608)(/../Coherent_Demdulation/envelope_demodulation.jpg)]](https://img-blog.csdnimg.cn/20200105204842872.jpg?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3doaXRlXzE1Ng==,size_16,color_FFFFFF,t_70)

