1. 摘要翻译
在本文中,我们提出了一种室内定位系统Lightitude,该系统利用由密集部署的室内光建立的已经存在的,不均匀的室内光强度分布作为媒介。由于普通的室内灯由于缺乏独特的功能(例如,独特的强度或闪烁频率)而无法充当地标,因此,利用接收光强度(RLI)的系统通常会对用户的动作施加强烈的约束,并对室内环境做出理想的假设。与这些方法不同,我们首先提出一个现实的光强度模型,以在给定接收器的任何运动(位置,方向)的情况下重建RLI分布,因此随接收器的每个运动收集的RLI都可以用于定位。然后,我们设计基于粒子过滤器的定位模块,该模块利用用户的自然移动性来消除单个RLI的歧义。实验结果表明,Lightitude在办公室(720m2)和图书馆(960m2)中的平均精度分别为1.93m和1.98m。轻度仍然能够抵御阳光,人体阴影和多种用户行为等干扰。
2. 简单介绍
作者结合了基于WiFi指纹的方法,作者认识基于WiFi常常会出现AP不足的情况。作者在城镇的医院,超级市场做了一些调查,发现363平方米才有一个AP点,这个足以应付平时的连接,但是不够用于定位使用。而光照在很多室内环境中是充足的(包括所有的灯具等),而且作者实验了一下光照随着时间的变化,受影响比WiFi的RSSI和CSI更小。
作者的第一个思想与WiFi指纹定位一样,不同的RLI(接受光照强度)对应不同的位置,将其作为一个分类任务。但是这样做存在一个主要问题:唯一的RLI值可能对应于多个可能的位置和接收者的运动(如下图)。

为了应对这些挑战,作者利用用户的移动性来设计定位模块(PM)。在大型室内环境(例如,超市,学校图书馆)中,用户的移动性很自然,并且它提供连续的RLI(隐式表示位置)和惯性传感器数据(隐式表示方向)。使用这些数据作为输入,PM生成多个候选轨迹。
除了PM模块,作者还设计了一个光照强度模块(LIM)。用于根据给定的位置和方向(偏航,横摇和俯仰)计算候选人的RLI。作者还考虑了很多类似于人的阴影、不可预测的行为等因素
3. 系统

主要包括数据收集,LIM和PM三个模块:
数据收集模块
- 定位服务提供商在目标环境中进行一次“一次就好”的现场调查。 这项调查的目的是获得室内灯光的光强度特征。 为实现这一目标,服务提供商将接收器(例如智能手机)放在每个灯的附近几秒钟。 为LIM记录光的坐标,接收器的坐标和方向矢量以及RLI。
- 如果用户打开“光度”应用程序,则配备的接收器从光传感器收集陀螺仪信号,并从陀螺仪,加速度计和方向传感器收集惯性传感器数据。 这些数据是Lightitude的输入。 IMU数据的采样率为67Hz,并且光传感器遵循传感器更改规则。
光强度模型(LIM):
根据输入数据的类型,LIM有两个任务:
•LIM使用服务提供商的数据作为输入,计算所有室内照明灯的光强度特征。
•LIM使用来自用户的数据和灯光特征(坐标,强度特征)作为输入,计算候选位置的RLI。
定位模块(PM):
PM在室内环境中生成一组候选对象(即,建议的粒子过滤器中的粒子),并将其理论RLI(来自LIM)与ground-truth RLI(来自光传感器)。如果粒子的理论RLI接近ground-truth RLI,则它将获得更大的权重。 通过利用用户的移动性,更新粒子的权重,直到触发收敛规则。
4.光强度模型(LIM):
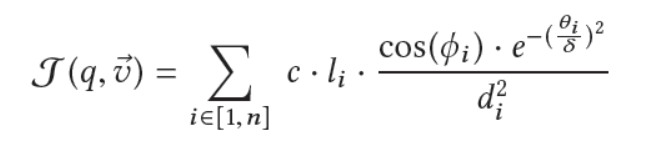
作者在原有的LIM上做了一些改进,其中主要的改进是考虑了多个光照点和接受端能够接收到的比例c。具体的见原文。
5.定位模块(PM)
该部分数学公式太多,读者可参考原文,大致意思是PM在室内环境中生成一组候选对象(即,建议的粒子过滤器中的粒子),并将其理论RLI(来自LIM)与ground-truth RLI(来自光传感器)。如果粒子的理论RLI接近ground-truth RLI,则它将获得更大的权重。 通过利用用户的移动性,更新粒子的权重,直到触发收敛规则。并且考虑了阳光的干扰,人体阴影,不可预测的活动。
6.最终实验结果

平均误差分别是8.88m, 5.75m, 4.20m, 1.79m和1.26m
