目录
Neal R. M. , MCMC Using Hamiltonian Dynamics[J]. arXiv: Computation, 2011: 139-188.
@article{neal2011mcmc,
title={MCMC Using Hamiltonian Dynamics},
author={Neal, Radford M},
journal={arXiv: Computation},
pages={139--188},
year={2011}}
算法
先把算法列一下.
Input: 初始值\(q\), 步长\(\epsilon\)与leapfrog迭代次数\(L\).
- 令\(q^{(0)} = q\);
- 循环迭代直到停止条件满足(以下第\(t\)步):
- 从标准正态分布中抽取\(p\), \(q = q^{{(t-1)}}\), \(p^{(t-1)} = p\).
- \[ \tag{alg.1} p = p- \epsilon \nabla_q U(q) / 2, \]
- 重复 \(i=1,2,\ldots, L\):
- \[ \tag{alg.2} q = q + \epsilon \nabla_pH(p), \]
- 如果\(i \not = L\):
\[ \tag{alg.3} p = p- \epsilon \nabla_q U(q). \]
- \[ \tag{alg.4} p = p- \epsilon \nabla_q U(q) / 2, \quad p^* = -p, q^*=q. \]
- 计算接受概率
\[ \tag{alg.5} \alpha = \min \{ 1, \exp(-H(q^*,p^*) + H(q^*, p^*)\}. \] - 从均匀分布\(U(0,1)\)中抽取\(u\), 如果\(u<\alpha\), \(q^{(t)}=q^*\), 否则\(q^{(t)}=q^{(t-1)}\).
output: \(\{p^{(t)},q^{(t)}\}\).
注: 1中的标准正态分布不是唯一的, 但是文中选的便是这个. 4中的\(p^*=-p\)在实际编写程序的时候可以省去.
符号说明
因为作者从物理方程的角度给出几何解释,所以这里给出的符号一般有俩个含义:
|符号| 概率| 物理|
|--|--|--|
| \(q\) | 随机变量,服从我们所在意的分布 | 冰球的位置|
| \(p\)| 用以构造马氏链的额外的变量 | 冰球的动量(mv) |
| \(U(q)\) | ...与我们所在意的分布有关 | 冰球的势能 |
| \(K(p)\) | ... | 冰球的动能 |
| \(H(q, p)\) | 与我们所在意的分布有关 | \(H(q, p) = U(q) + K(p)\) |
Hamilton方程
物理解释
Hamilton方程(\(i=1,2,\ldots, d\), \(d\)是维度):
\[ \tag{2.1} \frac{dq_i}{dt} = \frac{\partial H}{\partial p_i} \]
\[ \tag{2.2} \frac{dp_i}{dt} = -\frac{\partial H}{\partial q_i} \]
这个东西怎么来的, 大概是因为\(H(q, p) = U(q)+K(p)\), 如果机械能守恒, 那么随着时间\(t\)的变化\(H(q, p)\)应该是一个常数, 所以其关于t的导数应该是0.
\[ \frac{dH}{dt} = \sum_i [\frac{\partial H}{\partial p_i} \frac{dp_i}{dt}+\frac{\partial H}{\partial q_i}\frac{dq_i}{dt}] = (\nabla_p H)^T \dot{p}+(\nabla_qH)^T \dot{q} = 0, \]
其中\(\dot{p}=(\partial{p_1}/\partial t, \ldots, \partial p_d / \partial t)\).
而\((2.1)\), 左边是速度\(\dot{q} = v\), 右边
\[ \nabla_p H = \nabla_p K = \nabla_p \frac{|p|^2}{2m} = \frac{p}{m} = v=\dot{q}. \]
不过,估计是先有的(2.2)再有的H吧, 就先这么理解吧. 需要一提的是, \(K(p)\)通常定义为
\[ K(p)=p^TM^{-1}p/2, \]
其中\(M\)是对称正定的, 后面我们可以看到, 这种取法与正态分布相联系起来.
此时:

一些性质
可逆 Reversibility
映射\(T_s: (q(t), p(t)) \mapsto (q(t+s), p(t+s))\)是一一的,这个我感觉只能从物理的解释上理解啊, 一个冰球从一个点到另一个点, 现在H确定, 初值确定, 不就相当于整个轨迹都确定了吗, 那从哪到哪自然是一一的, 也就存在逆\(T_{-s}\), 且只需:
\[ \frac{dq_i}{dt} = -\frac{\partial H}{\partial p_i}, \]
\[ \frac{dp_i}{dt} = -(-\frac{\partial H}{\partial q_i}). \]
H的不变性
即

当然, 因为我们的算法是离散化的, 所以这个性质只是在\(\epsilon\)比较小的时候近似保持.
保体积 Volume preservation
即假设区域\(R=\{(q,p)\}\)在映射\(T_t\)的作用下为\(R_t=\{(q(t), p(t)\}\), 则二者的体积相同, 均为\(V\).
定义
\[ v(t)= \int_{R_t} dV = \int_{R} \det( \frac{\partial T_t}{\partial z}) dV, \]
其中\(z = (q, p)\). 又
\[ z(t) = T_tz = z+t J\nabla H(z) + \mathcal{O}(t^2), \]
其中
\[ f:=\frac{dz}{dt} = J\nabla H(z), \\ J = \left ( \begin{array}{ll} 0_{d \times d} & I_{d\times d} \\ -I_{d\times d} & 0_{d \times d} \end{array}\right ). \]
所以
\[ \frac{\partial{T_t}}{\partial z} = I + \frac{\partial f}{\partial z}t + \mathcal{O}(t^2), \]
又对于任意方阵\(A\),

所以
\[ \det (\frac{\partial{T_t}}{\partial z} ) = 1 + \mathrm{tr}(\partial f / \partial z) t + \mathcal{O}(t^2), \]
且\(\mathrm{tr}(\partial f / \partial z)=\mathrm{div} f\), 于是
\[ \frac{d v}{ d t} |_{t=0} = \int_{R}\mathrm{div} f \: d V. \]
又
\[ \mathrm{div}f = \mathrm{div} J\nabla H(z) = J \mathrm{div} \nabla H(z) = \sum_{i=1}^d [\frac{\partial}{\partial q}\frac{\partial H}{\partial p_i}-\frac{\partial}{\partial p}\frac{\partial H}{\partial q_i}] = 0. \]
对于\(t=t_0\), 我们都可以类似的证明\(dv(t_0)/dt=0\), 所以\(v(t)\)是常数.
这部分的证明参考自
辛 Symplecticness
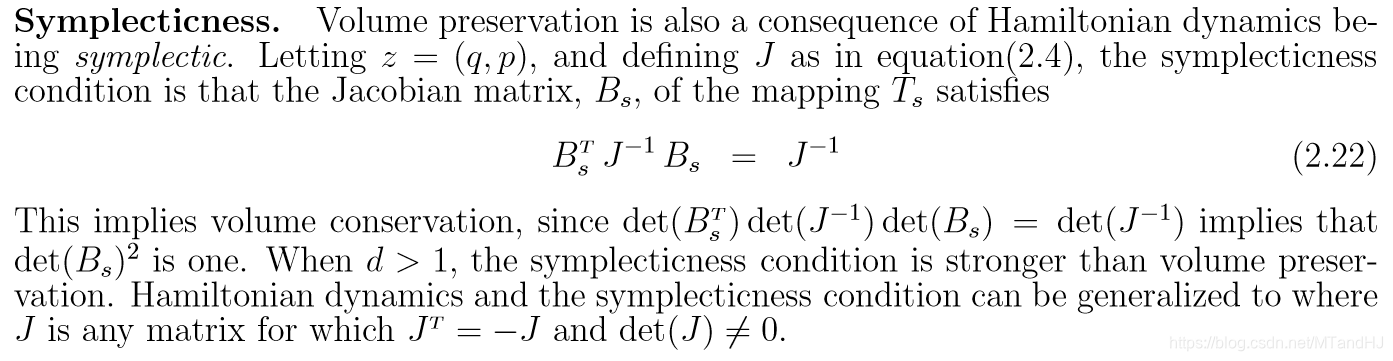
离散化Hamilton方程 leapfrog方法
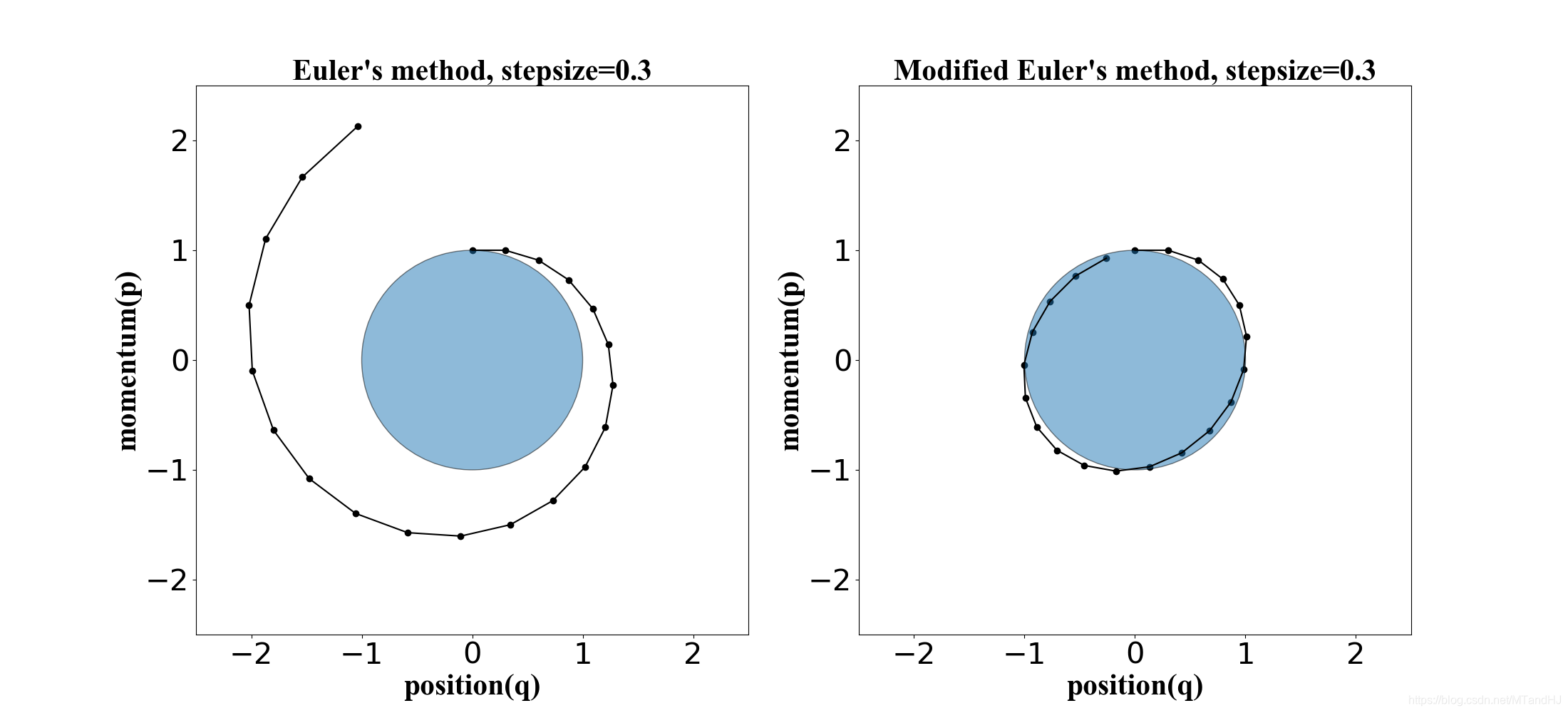
下面四幅图, 是\(U(q)=q^2/2, K(p)=p^2/2\), 起始点为\((q, p) = (0, 1)\).
Euler's method
如果假定\(K(p) = \sum_{i=1}^d \frac{p_i^2}{2m_i}\),

Modified Euler's method
仅有一个小小的变动,

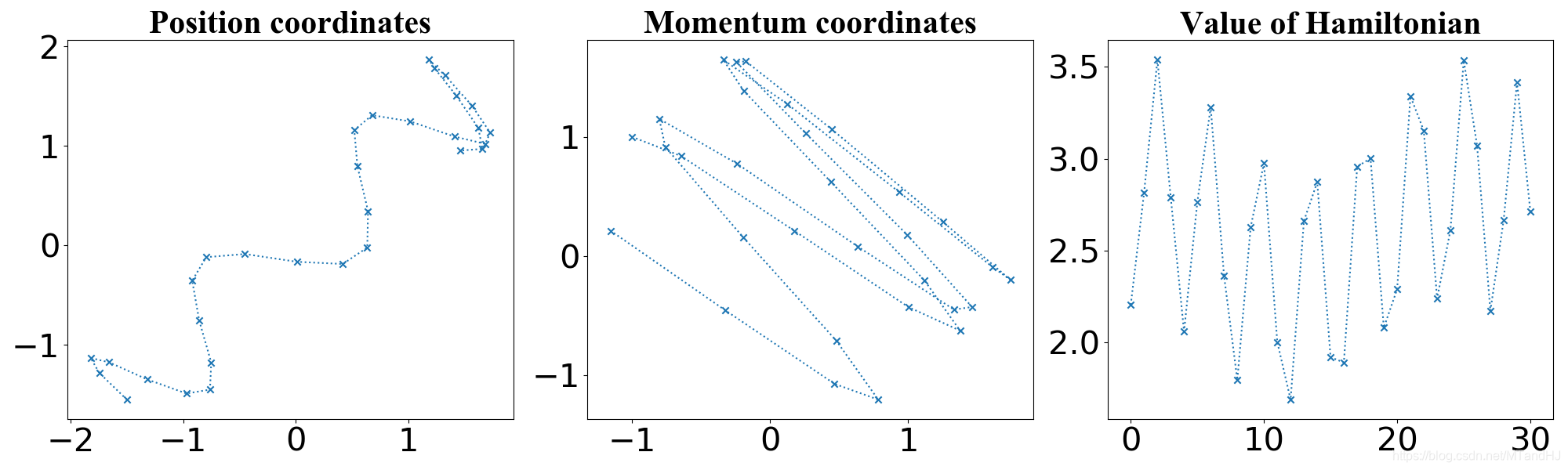
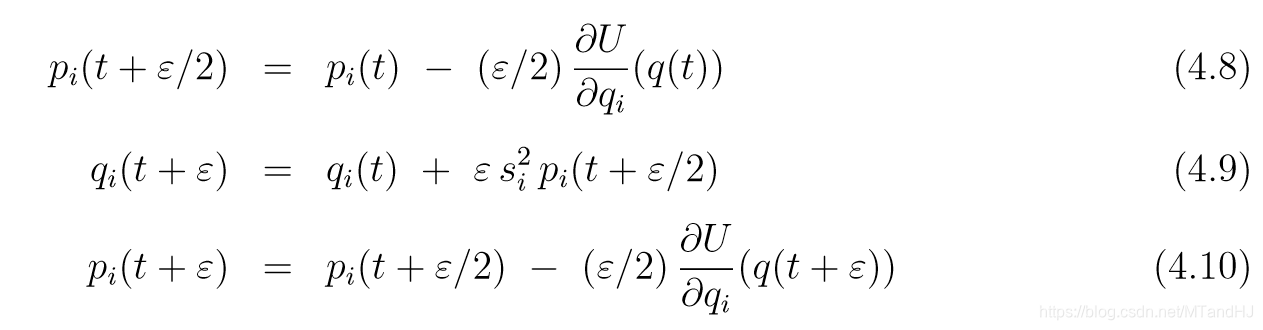
Leapfrog method
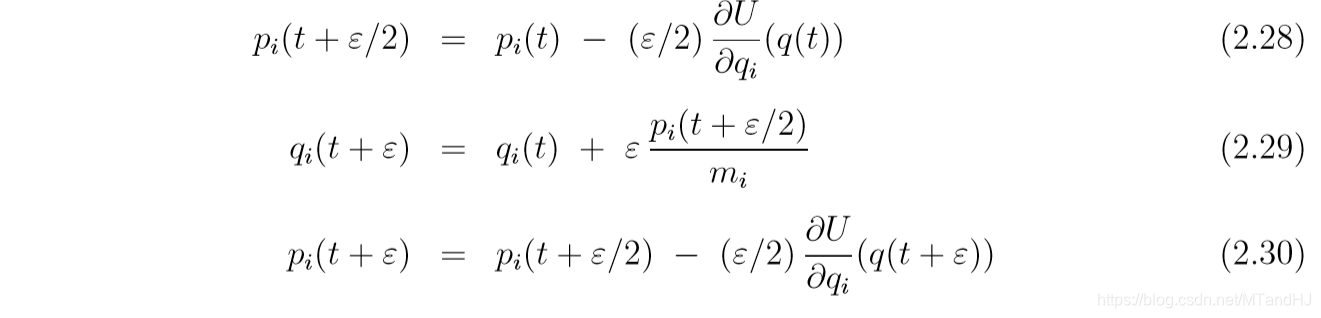
注意到, 在实际编写程序的时候, 除了第一步和最后一步, 我们可以将\(p\)的俩个半步合并成一步.
另外从右下角的图可以发现, 因为离散化的缘故, \(H(q, p)\)的值是有偏差的. 但是Leapfrog 方法和 modified Euler方法都是保体积的, 因为每步更新都只改变一个量, 可以验证其雅可比行列式为1.
MCMC
概率与Hamiltonian, 正则(canonical)分布
如何将分布于Hamilton方程联系在一起? 假如, 我们关心的是\(q\)的分布\(P(q)\), 则我们构造一个容易采样的分布\(P(q)\),
\[ \tag{3.2} P(q, p) = \frac{1}{Z}\exp(-H(q,p)/T), \]
其中\(Z\)是规范化的常数, \(T\)一般取1. 从(3.2)中容易得到\(H(q,p)\). 事实上此时\(q, p\)是独立的(这么写是说明直接构造\(P(q, p)\)也是可以的), 则可以分别
\[ P(q) = \frac{1}{Z_1}\exp(-U(q)/T), \\ P(p) = \frac{1}{Z_2}\exp(-K(p)/T). \]
在贝叶斯统计中, 有
\[ U(q) = -\log [\pi (q) L(D|q)], \]
其中\(D\)为数据, \(L\)为似然函数, 与文章中不同, 文章中是\(L(q|D)\), 应该是笔误.
HMC算法
就是开头提到的算法, 但是其中有一些地方值得思考. (alg.4)我们令\(p^*=-p\), 这一步在实际中是不起作用的, 既然\(K(p)=K(-p)\)而且在下轮中我们重新采样\(p\), 我看网上的解释是为了理论, 取反这一部分使得proposal是对称的, 是建议分布\(g(p^*, q^*|p, q)=g(p, q| p^*, q^*)\)? 不是很懂.
有点明白了, 首先因为Leapfrog是确定的, 所以\(P(q^*, p^*|q, p)\)非0即1:
\[ P(q^*, p^*|q, p) = \delta(q^*,p^*,q,p) = \left \{ \begin{array}{ll} 1, & T_{L\epsilon} (q, p) = q^*, p^*, \\ 0, & T_{L\epsilon} (q, p) \not = q^*, p^*. \end{array} \right. \]
为了\(P(q^*, p^*|q, p)=P(q, p|q^*, p^*)\), 如果不取反肯定不行, 因为他就会往下走, 取反的操作实际上就是在可逆性里提到的, 在同样的操作下, \(q^*, p^*\)会回到\(q, p\). 于是MH接受概率就退化成了M接受概率. 但是前文也提到了, 取反的操作, 只有在\(K(p)=K(-p)\)的情况下是成立的.
HMC保持正则分布不变的证明 detailed balance
假设\(\{A_k\}\)是\((q, p) \in \mathbb{R}^{2d}\)空间的一个分割, 其在L次leapfrog的作用, 及取反的操作下的像为\(\{B_k\}\), 由于可逆性, \(\{B_k\}\)也是一个分割, 且有相同的体积\(V\)(保体积性),则
\[ P(A_i) T(B_j|A_i) = P(B_j)T(A_i|B_j). \]
实际上\(i\not =j\)是时候是显然的, 因为二者都是0. 因为\(H\)是连续函数, 当\(V\)变得很小的时候, \(H\)在\(X\)区域上的值相当于常数\(H_X\), 于是

所以(3.7)成立.
Detailed balance:
其中\(R(X)\)是当前状态属于\(X\), 拒绝提议的\((q^*,p^*)\)的概率. 注意\(\sum_{i} T(A_i|B_k)=T(A_k|B_k)=1-R(B_k)\). 看上面的连等式可能会有点晕, 注意到, 左端实际上是概率\(P\{q^{(t)}, p^{(t)}) \in B_k\}\), 最右端是\(P\{(q^{(t-1)}, p^{(t-1)}) \in B_k\}\), 这样就能明白啥意思了.
遍历性 Ergodicty
马氏链具有遍历性才会收敛到一个唯一的分布上(这部分不了解), HMC是具有这个性质的, 只要\(L\)和\(\epsilon\)选的足够好. 但是如果选的不过也会导致坏的结果, 比如上面的图, \(p^2+q^2=1\), 如果我们选择了\(L\epsilon \approx 2\pi\), 那么我们的Leapfrog总会带我们回到原点附近, 这就会导致比较差的结果.
HMC的一个例子及优势
下图是:

\(\epsilon=0.25, L=30, q = [-1.5, -1.55]^T, p=[-1, 1^T]\).
相关系数由\(0.95\)改为\(0.98\), \(\epsilon=0.18, L=20\), 随机游走取的协方差矩阵为对角阵, 标准差为\(0.18\), HMC生成\(p\)的为标准正态分布.
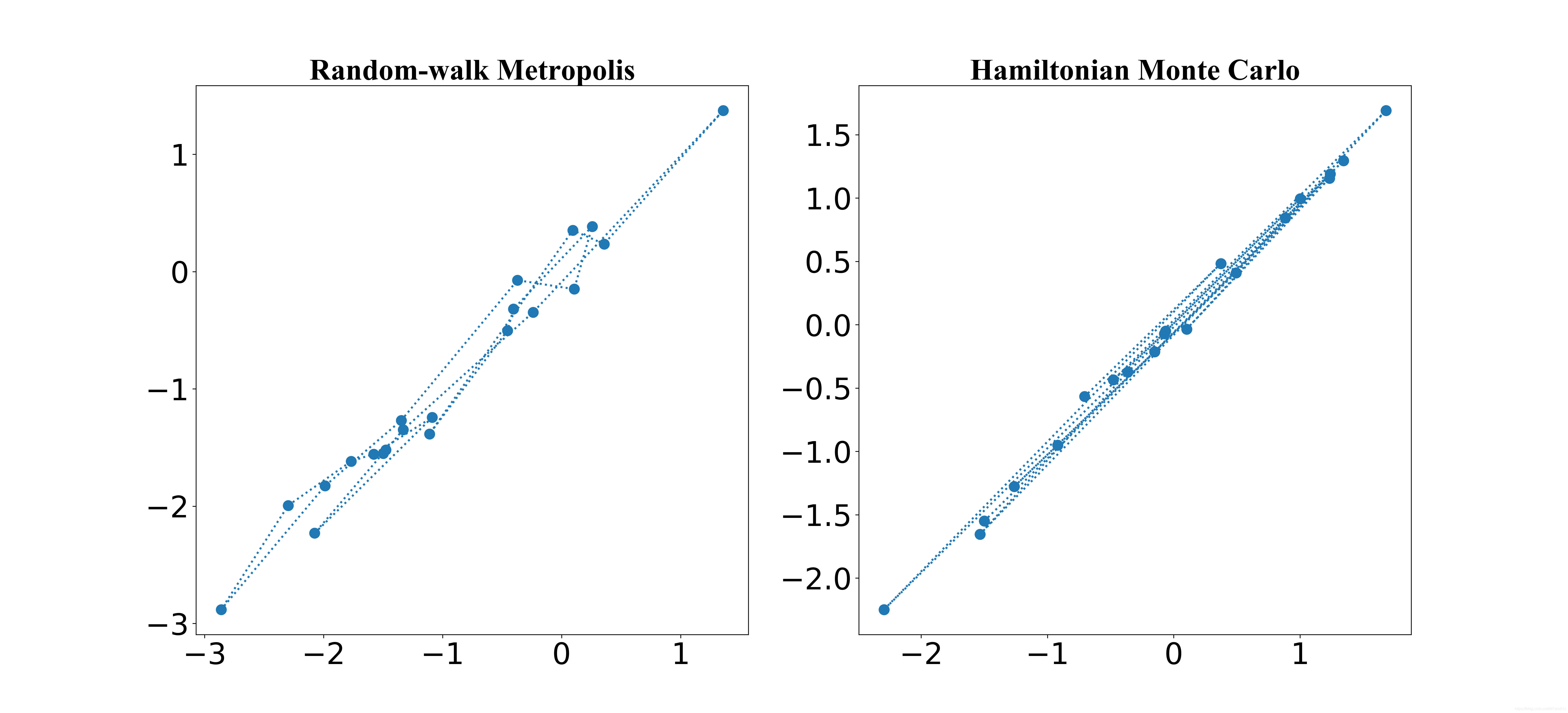
文章中提到, HMC较Randomwalk的优势在于,Randomwalk对协方差很敏感, 而且太大会导致接受率很低, 太小俩俩之间的相关性又会太高.
HMC在实际中的应用和理论
线性变换
有些时候, 我们会对变量施加线性映射\(q'=Aq\)(\(A\)非奇异方阵), 此时新的密度函数\(P'(q') = P(A^{-1}q') / |\det (A)|\), 其中\(P(q)\)是\(q\)的密度函数, 相应的我们需要令\(U'(q')=U(A^{-1}q')\).
如果我们希望线性变化前后不会是的情况变得"更糟", 一个选择是\(p'=(A^T)^{-1}p\),则\(K'(p')=K(A^Tp')\), 如果\(K(p) = p^TM^{-1}p / 2\), 则

其中\(M' = (AM^{-1}A^T)^{-1}=(A^{-1})^TMA^{-1}\). 此时\((q', p')\)的更新会使得原先的\((q,p)\)的更新保持, 即

所以\((q, p)\)本质上按照原来的轨迹发生着变化.
设想, 我们对\(q\)的协方差矩阵有一个估计\(\Sigma\), 且近似服从高斯分布, 我们可以对其做Cholesky分解\(\Sigma=LL^T\), 并且令\(q'=L^{-1} q\), 则\(q'\)的各分量之间就相互独立了, 那么我们很自然的一个选择是\(K(p)=p^Tp/2\), 那么\(q'\)的各分量的独立性能够保持.
另一个做法是, 保持\(q\)不变, 但是\(K(p) = p^T \Sigma p / 2\), 此时\(q'=L^{-1}q, p'=(L^{T})^{-1}p\), 则相当于
\[ K(p')=(p')^T{M'}^{-1}p', \quad M' = (L^{-1}LL^T(L^{-1})^T)^{-1}=I. \]
所以俩个方法是等价的.
HMC的调整\(\epsilon, L\)
HMC对\(\epsilon, L\)的选择比较严苛.
预先的实验
我们可以对一些\(\epsilon,L\)进行实验, 观察轨迹, 虽然这个做法可能产生误导, 另外在抽样过程中随机选择\(\epsilon, L\)是一个不错的选择.
stepsize \(\epsilon\)
\(\epsilon\)的选择很关键, 如果太大, 会导致低的接受率, 如果太小, 不仅会造成大量的计算成本, 且如果此时\(L\)也很小, 那么HMC会缺乏足够的探索.
考虑下面的例子:

每一次leapfrog将\((q(t), p(t))\)映射为\((q(t+s), p(t+s))\), 则

\((q, p)\)是否稳定, 关键在于系数矩阵的特征值的模(?还是实部)是否小于1, 特征值为

当\(\epsilon>2\sigma\)的时候,(4.6)有一个实的大于1的特征值, 当\(\epsilon < 2 \sigma\)的时候, 特征值是复制, 且模为:

所以, 我们应当选择\(\epsilon < 2\sigma\).
在多维问题中, \(K(p)=p^Tp/2\),如果\(q<0\)且协方差矩阵为\(\Sigma\), 我们可以取协方差矩阵的最小特征值(非零?)作为步长. 如果\(K(p)=p^TM^{-1}p/2\), 我们可以通过线性变化将其转换再考虑.
tracjectory length \(L\)
如何选择\(L\)也是一个问题, 我们需要足够大的\(L\)使得每次的探索的足够的, 以便能够模拟出独立的样本, 但是正如前面所讲, 大的\(L\)不仅会带来计算成本, 而且可能会导致最后结果在起点附近(由周期性带来的麻烦). 而且\(L\)没法通过轨迹图正确的选择. 一个不错的想法是在一个小的区间内随机选择\(L\), 这样做可能会减少由于周期性带来的麻烦.
多尺度
我们可以利用\(q\)的缩放信息, 为不同的\(q_i\)添加给予不同的\(\epsilon_i\). 比方说在\(K(p)=p^Tp/2\)的前提下, 应该对\(q_i\)放大\(s_i\)倍, 即\(q'= q / s_i\)(\(p\)不变).
等价的, 可以令\(K(p) = p^TM^{-1}p / 2, m_i = 1/ s_i^2\)(\(q\)不变), 相当于\(q_i'=q_i/s_i, p'=s_ip\), 则
\(m_i' = s_i (1/ s_i^2)s_i=1\), 所以\(K(p')=(p')^Tp'/2\). 这么做就相当于一次leapfrog为:
结合HMC与其它MCMC
当我们所关心的变量是离散的, 或者其对数概率密度(\(U(q)\))的导数难以计算的时候, 结合其它MCMC是有必要的.
Scaling with dimensionality
\(U(q) = \sum u_i(q_i)\)的情况
如果\(U(q)=\sum u_i(q_i)\), 且\(u_i\)之间相互独立(?), 这种假设是可行的, 因为之前已经讨论过, 对于\(q\)其协方差矩阵为\(\Sigma\), 我们可以通过线性变化使其对角化, 且效能保持.
Cruetz指出, 任何的Metropolis形式的算法在采样密度函数\(P(x)=\frac{1}{Z}\exp(-E(x))\)的时候都满足:

其中\(x\)表现在的状态, 而\(x^*\)表提议. 则根据Jensen不等式可知:
\[ 1 = \mathbb{E}[\exp(\Delta)] \ge \exp(\mathbb{E}[-\Delta]), \]
所以\(\mathbb{E}[-\Delta]\le 0\),
\[ \tag{4.18} \mathbb{E}[\Delta] \ge 0. \]
在\(U(q) = \sum u_i(q_i)\)的情况下, 令\(\Delta_1:=E(x^*)-E(x)\), \(x=q_i, E(x)=u_i(q_i)\)或者\(x=(q_i, p_i), E(x)=u_i(q_i)=p_i^2/2\). 对于整个状态, 我们则用\(\Delta_d\)表示, 则\(\Delta_d\)是所有\(\Delta_1\)的和. 既然\(\Delta\)的平均值均为正, 这会导致接受概率\(\min (1, \exp(-\Delta_d)\)的减小(随着维度的增加), 除非以减小步长作为代价, 或者建议分布的宽度进一步降低(即\(x,x^*\)尽可能在一个区域内).
因为\(\exp(-\Delta_1) \approx 1 -\Delta_1+\Delta_1^2 / 2\), 再根据(4.17)得:
\[ \tag{4.19} \mathbb{E} [\Delta_1] \approx \mathbb{E} [\Delta_1^2]/2. \]
故\(\Delta_1\)的方差约是均值的两倍(\(\Delta_1\)足够小的时候), 类似的也作用与\(\Delta_d\). 为了有一个比较好的接受率, 我们应当控制\(\Delta_d\)的均值在1左右(小于?), 此时\(\exp(-1)\approx0.3679\).
HMC的全局误差(标准差)在\(\mathcal{O}(\epsilon^2)\)级别, 所以\(\Delta_1^2\)应当在\(\epsilon^4\)级别, 所以\(\mathbb{E}[\Delta_1]\)也应当在\(\epsilon^4\)级别, 则\(\mathbb{E}[\Delta_d]\)在\(d\epsilon^4\)级别上, 所以为了保持均值为1左右, 我们需要令\(\epsilon\)正比于\(d^{1/4}\), 相应的\(L\)为\(d^4\).
文章中还有关于Randomwalk的分析, 这里不多赘述了.
HMC的扩展和变种
这个不一一讲了, 提一下
分割
假如\(H\)能够分解成:

那么我们可以一个一个来处理, 相当于\(T_{1, \epsilon} \circ T_{2, \epsilon}, \circ \cdots \circ T_{k-1, \epsilon} \circ T_{k, \epsilon}\). 这个做法依旧是保体积的(既然每一个算子都是保体积的), 但是如果希望其可逆(对称), 这就要求\(H_i(q, p)=H_{k-i+1}(q, p).\) 这个有很多应用场景:
比如\(U(q) = U_0(q)+U_1(q)\), 其中计算\(U_0\)如果是容易的, 我们可以作如下分解:

此时有\(3M+2\)项, \(H_1(q, p) = H_k(q, p)=U_1(q)/2\), \(H_{3i-1}=H_{3i+1}=U_0(q)/2M\), \(H_{3i}=K(p)/M\). 此时对于中间部分, 相当于步长变小了,误差自然会小.
当处理大量数据, 并用到似然函数的时候:
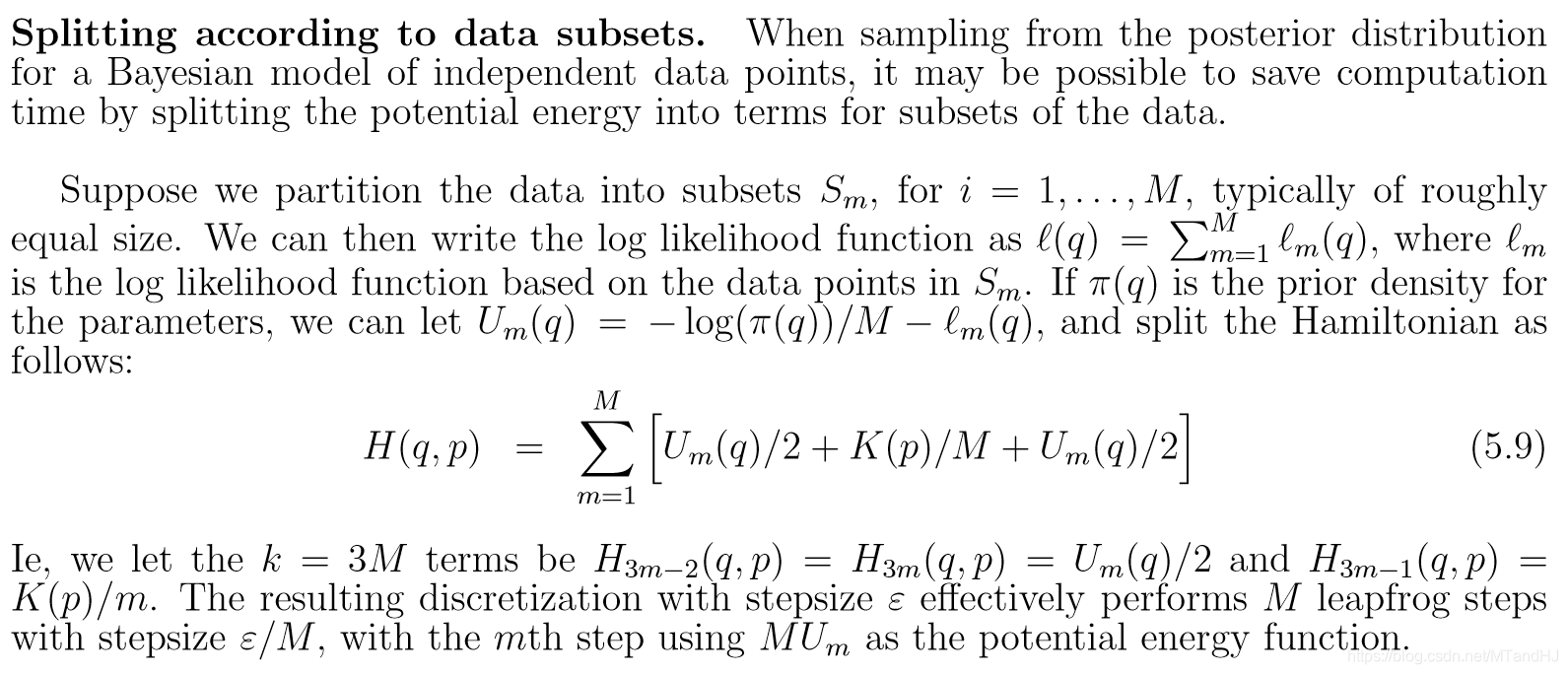
不过文章中说这个分解是不对称的, 可明明是对称的啊.
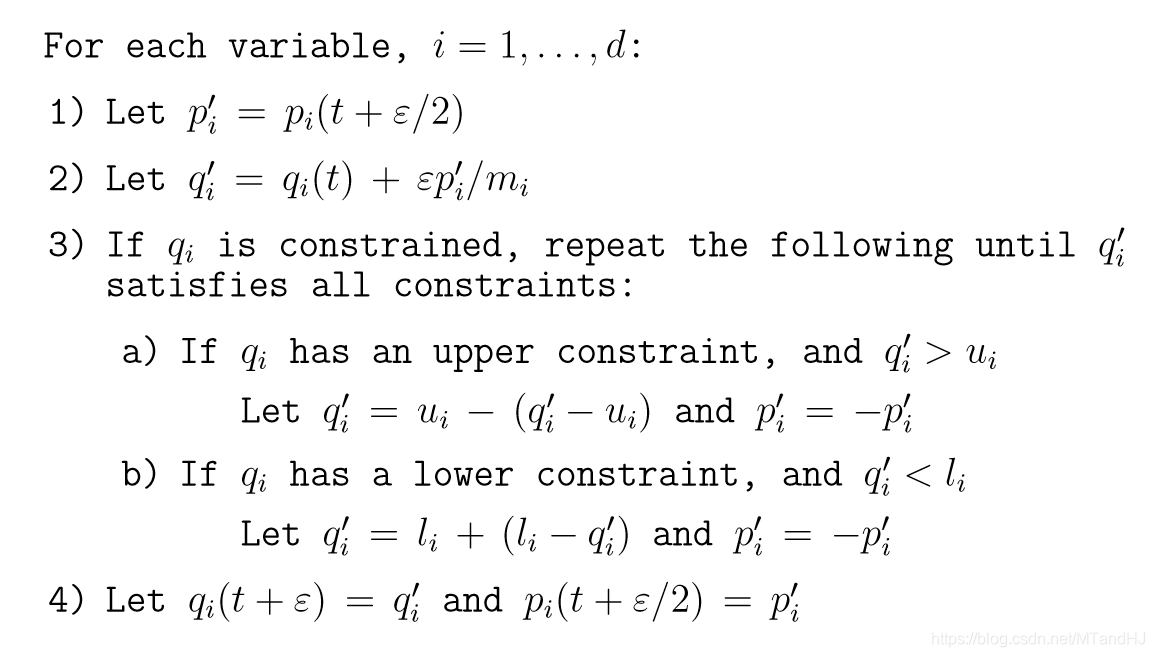
处理约束
有些时候, 我们对\(q\)有约束条件, 比方\(q >v, q<w\)等等, 直接给算法:
Langevin method, LMC
假设我们使用\(K(p)=(1/2)\sum p_i^2\), \(p\)从标准正态分布中采样, 每次我们只进行一次leapfrog变计算接受概率, 即

以及其接受概率:

Windows of states
这个方法试图将\(H\)的曲线平滑来提高接受率.
我们可以通过任意\((q, p)\)构造一列\([(q_0, p_0), \ldots, (q_{W-1}, p_{W-1})]\). 首先从\(\{0, 1, \ldots, W-1\}\)中等概率选一个数, 这个数代表\((q, p)\)在序列中的位置, 记为\((q_s, p_s)\), 则其前面的可以通过leapfrog (\(-\epsilon\))产生, 后面的通过leapfrog(\(+\epsilon\))产生. 所以任意列的概率密度为:

然后从\((q_{W-1}, p_{W-1})\)出发, 通过L-W+1步leapfrog(\(+\epsilon\))获得\([q_W,p_W,\ldots, (q_L, p_L)]\)并定义提议序列为\([(q_L, -p_{L}), \ldots, (q_{L-W+1}, p_{L-W+1)}]\),计算接受概率:

其中\(P(q, p)\propto \exp(-H(q,p))\). 设拒绝或者接受后的状态为:\([(q_0^+, p_0^+), \ldots, (q_{W-1}^+, p_{W-1}^+)]\), 依照概率

抽取\((q_e^+, p_e^+)\), 这个就是\((q,p)\)后的下一个状态.
文中说这么做分布不变, 因为:

如果没理解错, 前面的部分就是\((q_e^+, p_e^+)\)出现在最开始的序列中的概率, 但是中间的接受概率哪里去了? 总不能百分百接受吧...
代码
import numpy as np
from collections.abc import Iterator, Callable
from scipy import statsclass Euler:
"""
Euler方法
"""
def __init__(self, grad_u, grad_k, epsilon):
self.grad_u = grad_u
self.grad_k = grad_k
self.epsilon = epsilon
def start(self, p, q, steps):
trajectory_p = [p]
trajectory_q = [q]
for t in range(steps):
temp = p - self.epsilon * self.grad_u(q) # 更新一步P
q = q + self.epsilon * self.grad_k(p) # 更新一步q
p = temp
trajectory_p.append(p)
trajectory_q.append(q)
return trajectory_p, trajectory_q
def modified_start(self, p, q, steps):
"""
启动!
:param p:
:param q:
:param steps: 步数
:return: p, q
"""
trajectory_p = [p]
trajectory_q = [q]
for t in range(steps):
p = p - self.epsilon * self.grad_u(q) #更新一步P
q = q + self.epsilon * self.grad_k(p) #更新一步q
trajectory_p.append(p)
trajectory_q.append(q)
return trajectory_p, trajectory_qclass Leapfrog:
"""
Leapfrog 方法
"""
def __init__(self, grad_u, grad_k, epsilon):
self.grad_u = grad_u
self.grad_k = grad_k
self.epsilon = epsilon
self.trajectory_q = []
self.trajectory_p = []
def start(self, p, q, steps):
self.trajectory_p.append(p)
self.trajectory_q.append(q)
for t in range(steps):
p = p - self.epsilon * self.grad_u(q) / 2
q = q + self.epsilon * self.grad_k(p)
p = p - self.epsilon * self.grad_u(q) / 2
self.trajectory_q.append(q)
self.trajectory_p.append(p)
return p, q
class HMC:
"""
HMC方法
start为进行一次
accept_prob: 计算接受概率
hmc: 完整的过程
acc_rate: 接受概率
"""
def __init__(self, grad_u, grad_k, hamiltonian, epsilon):
assert isinstance(grad_u, Callable), "function needed..."
assert isinstance(grad_k, Callable), "function needed..."
assert isinstance(hamiltonian, Callable), "function needed..."
self.grad_u = grad_u
self.grad_k = grad_k
self.hamiltonian = hamiltonian
self.epsilon = epsilon
self.trajectory_q = []
self.trajectory_p = []
def start(self, p, q, steps):
self.trajectory_p.append(p)
self.trajectory_q.append(q)
p = p - self.epsilon * self.grad_u(q) / 2
for t in range(steps-1):
q = q + self.epsilon * self.grad_k(p)
p = p - self.epsilon * self.grad_u(q)
q = q + self.epsilon * self.grad_k(p)
p = p - self.epsilon * self.grad_u(q) / 2
p = -p
return p, q
def accept_prob(self, p1, q1, p2, q2):
"""
:param p1: 原先的
:param q1:
:param p2: 建议的
:param q2:
:return:
"""
p1 = np.exp(self.hamiltonian(p1, q1))
p2 = np.exp(self.hamiltonian(p2, q2))
alpha = min(1, p1 / p2)
return alpha
def hmc(self, generate_p, q, iterations, steps):
assert isinstance(generate_p, Iterator), "Invalid generate_p"
self.trajectory_q = [q]
p = next(generate_p)
self.trajectory_p = [p]
count = 0.
for t in range(iterations):
tempp, tempq = self.start(p, q, steps)
if np.random.rand() < self.accept_prob(p, q, tempp, tempq):
p = tempp
q = tempq
self.trajectory_p.append(p)
self.trajectory_q.append(q)
count += 1
p = next(generate_p)
self.acc_rate = count / iterations
return self.trajectory
@property
def trajectory(self):
return np.array(self.trajectory_p), \
np.array(self.trajectory_q)
class Randomwalk:
"""
walk: 完整的过程, 实际上Metropolis更新似乎就是start中steps=1,
一开始将文章的意思理解错了, 不过将错就错, 这样子也能增加一下灵活性.
"""
def __init__(self, pdf, sigma):
assert isinstance(pdf, Callable), "function needed..."
self.pdf = pdf
self.sigma = sigma
self.trajectory = []
def start(self, q, steps=1):
for t in range(steps):
q = stats.multivariate_normal.rvs(mean=q,
cov=self.sigma)
return q
def accept_prob(self, q1, q2):
"""
:param q1: 原始
:param q2: 建议
:return:
"""
p1 = self.pdf(q1)
p2 = self.pdf(q2)
alpha = min(1, p2 / p1)
return alpha
def walk(self, q, iterations, steps=1):
self.trajectory = [q]
count = 0.
for t in range(iterations):
temp = self.start(q, steps)
if np.random.rand() < self.accept_prob(q, temp):
q = temp
count += 1
self.trajectory.append(q)
self.acc_rate = count / iterations
return np.array(self.trajectory)