二分图的性质
定理:当且仅当无向图G的每一个回路的次数均是偶数时,G才是一个二分图。如果无回路,相当于任一回路的次数为0,故也视为二分图。
二分图的判定
如果一个图是连通的,可以用如下的方法判定是否是二分图:
在图中任选一顶点v,定义其距离标号为0,然后把它的邻接点的距离标号均设为1,接着把所有标号为1的邻接点均标号为2(如果该点未标号的话),如图所示,以此类推。
标号过程可以用一次BFS实现。标号后,所有标号为奇数的点归为X部,标号为偶数的点归为Y部。
接下来,二分图的判定就是依次检查每条边,看两个端点是否是一个在X部,一个在Y部。
如果一个图不连通,则在每个连通块中作判定。
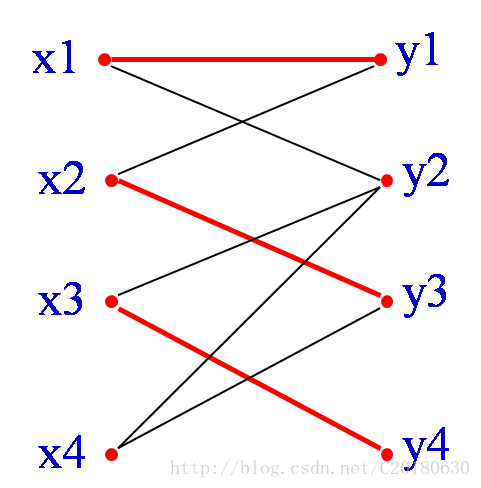
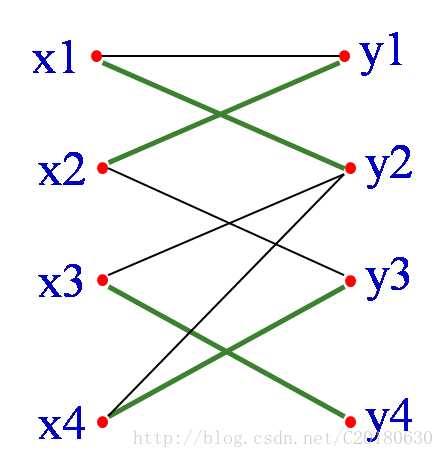
增广路。
如果你仔细读过并画过图,不难发现如果找到一条增广路,那么配对的个数就会加1。 所以说,增广路的本质其实就是一条路径的起点和终点都未配对的点的边。
匈牙利算法:
这个叫匈牙利算法(Hungarian method)的东西是由匈牙利数学家Edmonds于1965年提出,所以叫匈牙利算法。匈牙利算法是二分图匹配最常见的算法,该算法的核心就是寻找增广路径,它是一种用增广路径求二分图最大匹配的算法。
复杂度:
时间复杂度 : 邻接矩阵最坏为O(n3)
邻接表: O(mn)
空间复杂度 : 邻接矩阵:O(n2)
邻接表: O(n+m)
另一个重要概念:二分图
二分图是图论中的一种特殊模型。 设G=(V,E)是一个无向图,如果顶点V可分割为两个互不相交的子集(A,B),并且图中的每条边(i,j)所关联的两个顶点i和j分别属于这两个不同的顶点集,则称图G为一个二分图。
简而言之,就是顶点集V可分割为两个互不相交的子集,并且图中每条边依附的两个顶点都分属于这两个互不相交的子集,两个子集内的顶点不相邻。满足这样的图就叫二分图。
但我们怎么判断一个图是不是二分图???
其实也不难,用红蓝点的方法就行。首先讲任意的一个顶点染成红色,再把这个点相邻的顶点染成蓝色,如果按照这种染色方式可以将所有的顶点全部着色,并且相邻的顶点的颜色不同,那么该图就是一个二分图。


1 #define MAXV 1000//这里应该根据题目自定 2 3 vector<int> G[MAXV]; //图 4 int V; //顶点数 5 int color[MAXV]; //顶点的颜色 (1 or -1) 6 7 //顶点v,颜色c 8 bool dfs(int v,int c){ 9 color[v] = c; 10 //把当前顶点相邻的顶点扫一遍 11 for(int i = 0;i < G[v].size(); i++){ 12 //如果相邻顶点已经被染成同色了,说明不是二分图 13 if(color[G[v][i]] == c) return false; 14 //如果相邻顶点没有被染色,染成-c,看相邻顶点是否满足要求 15 if(color[G[v][i]] == 0 && !dfs(G[v][i],-c)) return false; 16 } 17 //如果都没问题,说明当前顶点能访问到的顶点可以形成二分图 18 return true; 19 } 20 21 void solve(){ 22 //可能是不连通图,所以每个顶点都要dfs一次 23 for(int i = 0;i < V; i++){ 24 if(color[i] == 0){ 25 //第一个点颜色为 1 26 if(!dfs(i,1)){ 27 cout << "No" << endl; 28 return; 29 } 30 } 31 } 32 }
匈牙利算法
根据上文的描述,既然增广路的作用是“改进匹配方案”(即增加配对数),那么如果我们已经找到了一种匹配方案,不难发现如果在当前匹配方案下再也找不到任何增广路的话,那么当前匹配就是二分图的最大匹配,算法如下。
1.首先从任意的一个未配对的点u开始,从点u的边中任意选一条边(假设这条边是从u->v)开始配对。如果点v未配对,则配对成功,这是便找到了一条增广路。如果点v已经被配对,就去尝试“连锁反应”,如果这时尝试成功,就更新原来的配对关系。
所以这里要用一个matched[v] = u。配对成功就将配对数加1,。
2.如果刚才所选的边配对失败,那就要从点u的边中重新选一条边重新去试。直到点u 配对成功,或尝试过点u的所有边为止。
3.接下来就继续对剩下的未配对过的点一一进行配对,直到所有的点都已经尝试完毕,找不到新的增广路为止。
4.输出配对数。
1 /* 2 1)如果后来的和以前的发生矛盾,则以前的优先退让 3 2)如果以前的退让之后没有cp可处,则以前的拒绝退让,新来的去寻找下一个匹配。 4 3)如果新来的谁也匹配不上了,那就这么单着吧 5 */ 6 #include<bits/stdc++.h> 7 #define MAXN 1000100 8 using namespace std; 9 typedef struct { 10 int from,to,next; 11 int weight; 12 }EDGE; 13 EDGE edges[MAXN]; 14 int head[MAXN],cnt=1;//从第一个点开始访问 15 int match[MAXN],dfn[MAXN];//匹配数组,时间戳数组 16 void add(int from ,int to) 17 { 18 edges[cnt].from=from; 19 edges[cnt].to=to; 20 edges[cnt].next=head[from]; 21 head[from]=cnt++; 22 } 23 bool dfs(int u,int vist) 24 { 25 for(int i=head[u];i;i=edges[i].next) 26 { 27 if(dfn[edges[i].to]!=vist) 28 {//如果本轮未访问 29 dfn[edges[i].to]=vist;//标记已访问 30 if(!match[edges[i].to]||dfs(match[edges[i].to],vist)) 31 {//如果有从match出发的增广路径 32 match[edges[i].to]=u;return true; 33 } 34 } 35 } 36 return false; 37 } 38 39 int main() 40 { 41 int n,m,e;cin>>n>>m>>e; 42 int ans=0; 43 for(int i=0;i<e;i++) 44 { 45 int a,b;cin>>a>>b; 46 if(a>n||b>m)continue; 47 add(a,b); 48 } 49 for(int i=1;i<=n;i++) 50 { 51 if(dfs(i,i))ans++; 52 } 53 cout<<ans<<endl; 54 return 0; 55 }