安装完ubuntu16.04后,U盘制作文件,在电脑/home/comeon-harry/yy/ubuntu16.04安装内容
一,首先是安装ROS:
参考以下网址:https://blog.csdn.net/softimite_zifeng/article/details/78632211
按照参考网址一步一步操作,但要注意以下两点:
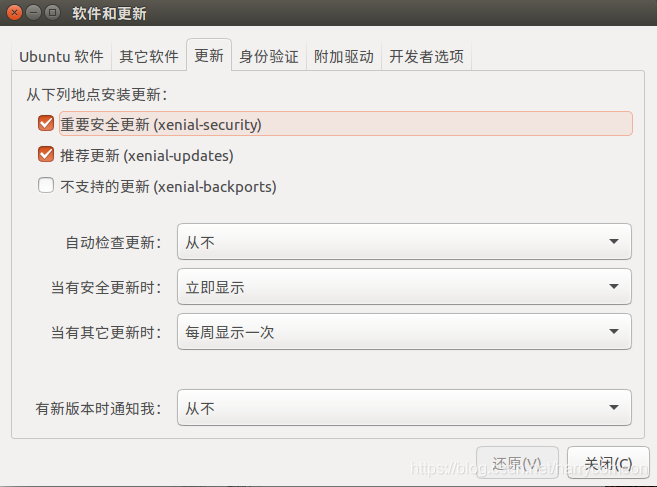
在第一步进行前,应该把现在源换成国内的aliyun镜像。同时不要关掉重要内容更新,保持默认。

第二个要注意的
上面的源是官网提供的,但安装没有成功。使用的是清华大学的源,如下:
sudo sh -c ‘. /etc/lsb-release && echo “deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main” > /etc/apt/sources.list.d/ros-latest.list’
二,其次是安装openni:
openni的安装包在此目录下,无需下载,/home/comeon-harry/yy/soft/opencv-2.4.9.zip
教程:https://www.cnblogs.com/sincere-diligence/p/9322313.html
注意点1:如果有安装包,无需下载,把解压包解压后有三个文件夹(NITE-Bin-Dev-Linux-x64-v1.5.2.23,OpenNI-Bin-Dev-Linux-x64-v1.5.7.10,SensorKinect093-Bin-Linux-x64-v5.1.2.1)放到/home/libfreenect/build目录下,然后按照教程里的步骤一步一步操作就可以。
提示安装kinect v2链接https://blog.csdn.net/u012424737/article/details/80609451
三,最后是安装PCL1.8:
链接:https://blog.csdn.net/dantengc/article/details/78446600
在有pcl1.8安装包时https://blog.csdn.net/D206_hero/article/details/78266113
这里
git clone https://github.com/PointCloudLibrary/pcl.git
cd pcl
这两步变成解压文件夹后改名为pcl
cd pcl 再继续下面的步骤
注意点:
cmake -DCMAKE_BUILD_TYPE=None -DCMAKE_INSTALL_PREFIX=/usr \
-DBUILD_GPU=ON -DBUILD_apps=ON -DBUILD_examples=ON \
-DCMAKE_INSTALL_PREFIX=/usr …
这一句改成
cmake -DCMAKE_CXX_STANDARD=11 -DCMAKE_BUILD_TYPE=None -DCMAKE_INSTALL_PREFIX=/usr /local -DBUILD_GPU=ON -DBUILD_apps=ON -DBUILD_examples=ON …
每一个-D××××前空一个格
改了红色部分用c++11编译后避免了段错误。