在win10上用vs2013编译及使用pcl180遇见了各种坑,这里做个汇总,既是总结,也希望能给后来人引路!
1.编译到visualization模块的时候,会有如下语句报错:
if (!pcl::visualization::getColormapLUT (static_cast<LookUpTableRepresentationProperties>(value), table))
break;
解决方案:
将所有的
static_cast<LookUpTableRepresentationProperties>(value)
修改成
static_cast<LookUpTableRepresentationProperties>(int(value))
2.编译官方教程中ICP例子时,出现下列错误:
error C4996: 'pcl::SAC_SAMPLE_SIZE': This map is deprecated and is kept only to prevent breaking existing user code. Starting from PCL 1.8.0 model sample size is a protected member of the SampleConsensusModel class
解决方案
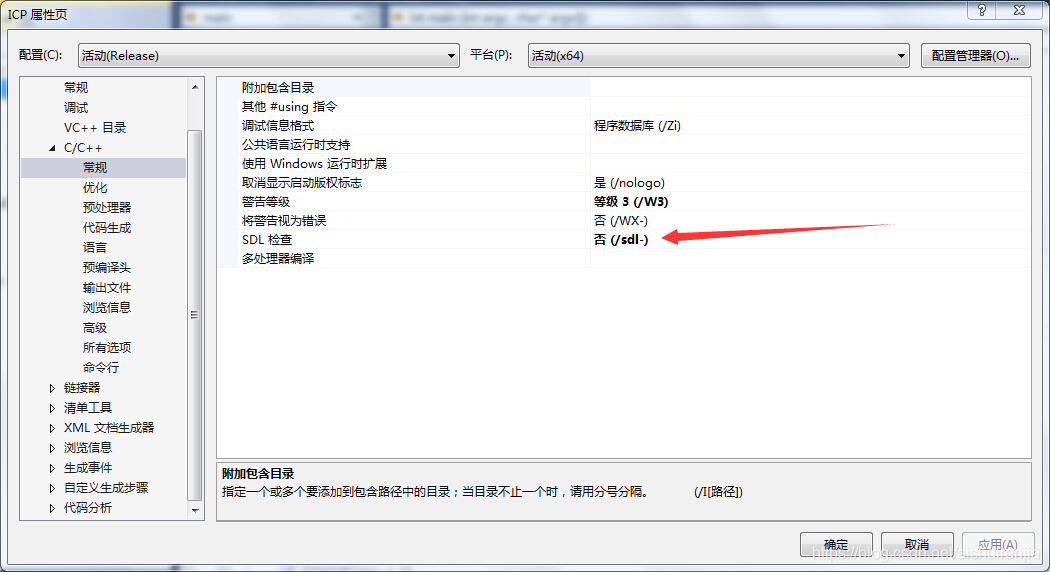
打开项目属性页->C/C+±>常规->SDL检查(设置为否)
若上面的方案无法解决这个错误,可以打开头文件“model_types.h”,修改其中的代码:
源码:
namespace pcl
{
const static std::map<pcl::SacModel, unsigned int>
PCL_DEPRECATED("This map is deprecated and is kept only to prevent breaking "
"existing user code. Starting from PCL 1.8.0 model sample size "
"is a protected member of the SampleConsensusModel class")
SAC_SAMPLE_SIZE (sample_size_pairs, sample_size_pairs + sizeof (sample_size_pairs) / sizeof (SampleSizeModel));
}
修改后:
namespace pcl
{
const static std::map<pcl::SacModel, unsigned int>
//PCL_DEPRECATED("This map is deprecated and is kept only to prevent breaking "
//"existing user code. Starting from PCL 1.8.0 model sample size "
//"is a protected member of the SampleConsensusModel class")
SAC_SAMPLE_SIZE (sample_size_pairs, sample_size_pairs + sizeof (sample_size_pairs) / sizeof (SampleSizeModel));
}
重新编译即可解决问题
3.错误信息
conditional_euclidean_clustering.obj : error LNK2001: 无法解析的外部符号 "public: void __cdecl pcl::ConditionalEuclideanClustering<struct pcl::PointXYZINormal>::segment(class std::vector<struct pcl::PointIndices,class std::allocator<struct pcl::PointIndices> > &)" (?segment@?$ConditionalEuclideanClustering@UPointXYZINormal@pcl@@@pcl@@QEAAXAEAV?$vector@UPointIndices@pcl@@V?$allocator@UPointIndices@pcl@@@std@@@std@@@Z)
1>conditional_euclidean_clustering.obj : error LNK2001: 无法解析的外部符号 "protected: virtual void __cdecl pcl::NormalEstimation<struct pcl::PointXYZI,struct pcl::PointXYZINormal>::computeFeature(class pcl::PointCloud<struct pcl::PointXYZINormal> &)" (?computeFeature@?$NormalEstimation@UPointXYZI@pcl@@UPointXYZINormal@2@@pcl@@MEAAXAEAV?$PointCloud@UPointXYZINormal@pcl@@@2@@Z)
1>E:\VisualStudio2013Project\PCLConsoleApplication\x64\Release\ConditionalEuclideanClustering.exe : fatal error LNK1120: 2 个无法解析的外部命令
在所有库都配置的情况下,若出现上述问题
解决方法
打开项目属性页>C/C++>预处理器,添加:
_CRT_SECURE_NO_WARNINGS
4.错误信息
e:\shizhenwei\vs2013projects\testicp1\testicp1\main.cpp(39): error C4996: 'pcl::Registration<PointSource,PointTarget,Scalar>::setInputCloud': [pcl::registration::Registration::setInputCloud] setInputCloud is deprecated. Please use setInputSource instead.
1> with
1> [
1> PointSource=pcl::PointXYZ
1> , PointTarget=pcl::PointXYZ
1> , Scalar=float
1> ]
1> d:\clibrary\pcl1.8.0\pcl1.8.0x86\include\pcl-1.8\pcl\registration\registration.h(183) : 参见“pcl::Registration<PointSource,PointTarget,Scalar>::setInputCloud”的声明
1> with
1> [
1> PointSource=pcl::PointXYZ
1> , PointTarget=pcl::PointXYZ
1> , Scalar=float
1> ]
解决办法:
//icp.setInputCloud(cloud_in);
icp.setInputSource(cloud_in);
5.计算法线时使用OpenMP加速问题
正确的头文件应该是 #include <pcl/features/impl/normal_3d_omp.hpp>
总结
在VS中编译开源库的工程,产生的问题可能五花八门,但其问题提示是比较清楚的,根据提示解决可以以不变应万变。实在解决不了,也可以问问度娘或google,正所谓内事不决问百度,外事不决问google。
参考链接:
https://blog.csdn.net/wokaowokaowokao12345/article/details/51287011
https://blog.csdn.net/Linear_Luo/article/details/52658984