在向量微积分中,标量场的梯度是一个向量场。标量场中某一点上的梯度指向标量场增长最快的方向,梯度的长度是这个最大的变化率。更严格的说,从欧几里得空间Rn到R的函数的梯度是在Rn某一点最佳的线性近似。
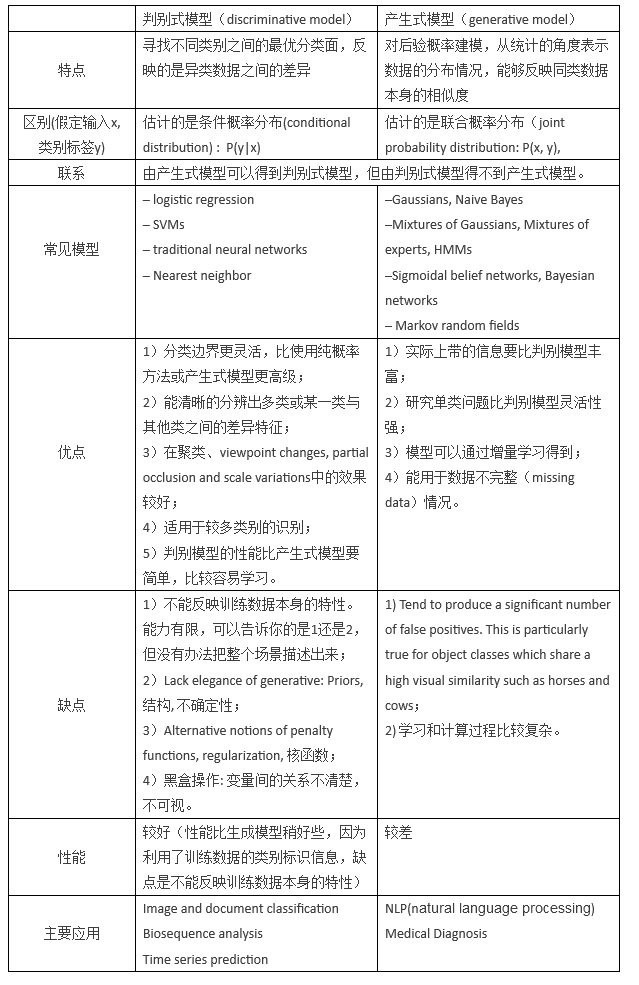
在判别式模型中,我们往往需要学习参数,从而使得我们的模型f(x)可以逼近实际的y。如果学习参数,则通常会用到梯度下降、牛顿、拟牛顿学习算法。
1.梯度下降
1.1 为何使用梯度作为下降方向?
梯度实际上是函数值变化最快的方向。
比如说,你站在一个山上,梯度所指示的方向是高度变化最快的方向。你沿着这个方向走,能最快的改变(增加或是减小)你所在位置的高度,但是如果你乱走,可能走半天所在位置高度也没有变化多少。也就是说,如果你一直沿着梯度走,你就能最快的到达山的某个顶峰或低谷(偶尔会到鞍点,不过这几乎不可能)。
所以实际上,梯度下降法是用来数值搜索局部极小值或极大值的,它是实际应用中一种非常高效,高速且可靠的方法。
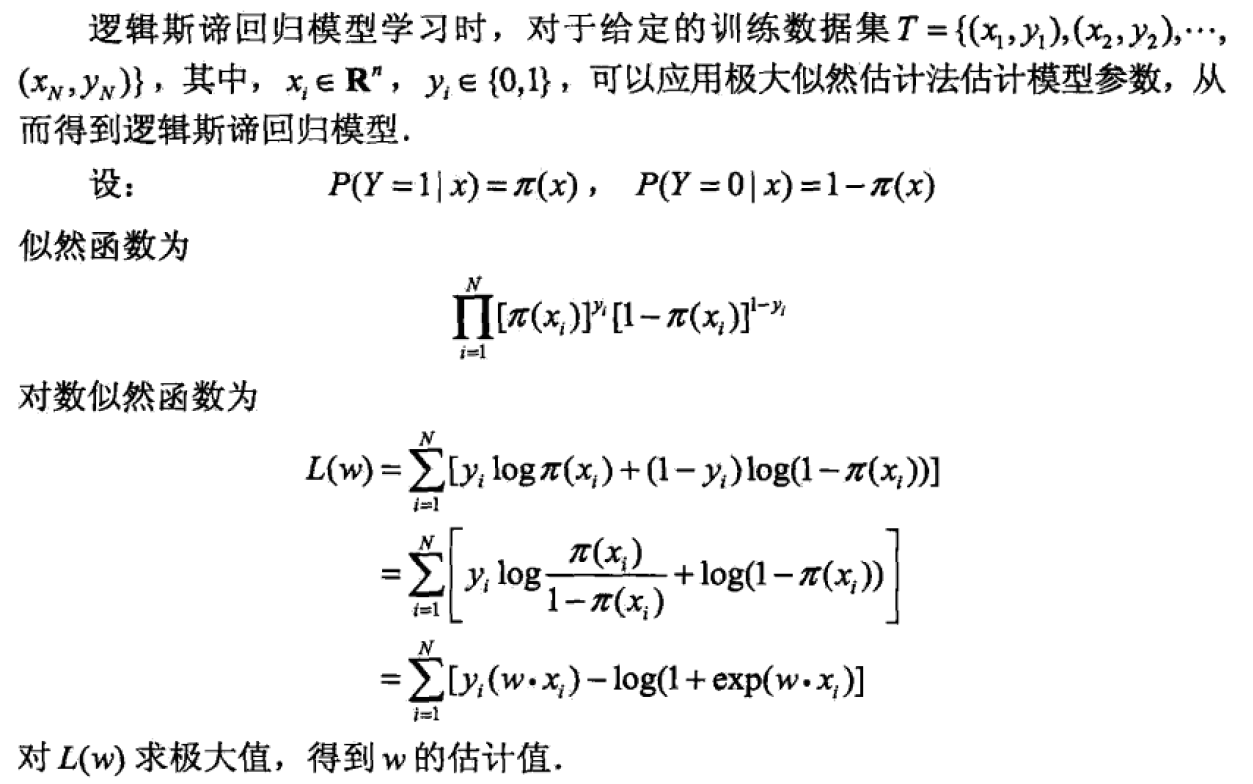
1.2 以逻辑斯蒂回归(LR)为例
- 模型参数估计
- 梯度下降学习参数
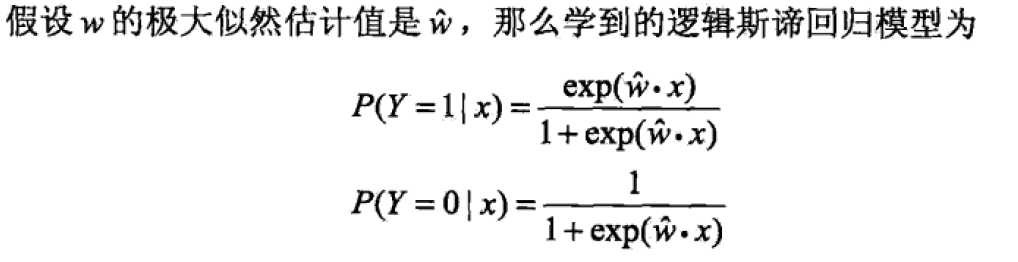
- 最终模型
1.3 具体学习过程(python代码示例)
梯度下降是最小化风险函数、损失函数的一种常用方法,随机梯度下降和批量梯度下降是两种迭代求解思路。
根据batch_size的不同,可以有大概一下几种形式。
(1)梯度下降伪代码
- 每个回归参数初始化为1
- 重复R次
- 计算整个数据集的梯度
- 使用alpha × gradient更新回归系数的向量
- 返回回归系数
示例代码:
def gradAscent(dataMatIn, classLabels):
dataMatrix = mat(dataMatIn) #convert to NumPy matrix
labelMat = mat(classLabels).transpose() #convert to NumPy matrix
m,n = shape(dataMatrix)
alpha = 0.001
maxCycles = 500
weights = ones((n,1))
for k in range(maxCycles): #heavy on matrix operations
h = sigmoid(dataMatrix*weights) #matrix mult
error = (labelMat - h) #vector subtraction
weights = weights + alpha * dataMatrix.transpose()* error #matrix mult
return weights- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
(2)随机梯度下降伪代码:
- 每个回归参数初始化为1
- 重复R次
- 计算每个样本的梯度
- 使用alpha × gradient更新回归系数的向量
- 返回回归系数
示例代码:
细心的读者可以看到,其中alpha是变化的,这样可以在一定程度上避免局部最优解。
def stocGradAscent1(dataMatrix, classLabels, numIter=150):
m,n = shape(dataMatrix)
weights = ones(n) #initialize to all ones
for j in range(numIter):
dataIndex = range(m)
for i in range(m):
alpha = 4/(1.0+j+i)+0.0001 #apha decreases with iteration, does not
randIndex = int(random.uniform(0,len(dataIndex)))#go to 0 because of the constant
h = sigmoid(sum(dataMatrix[randIndex]*weights))
error = classLabels[randIndex] - h
weights = weights + alpha * error * dataMatrix[randIndex]
del(dataIndex[randIndex])
return weights- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
(3)自定义batch_size,算法流程与上面基本差不错,累计误差更新参数。梯度下降,就是batch_size = 全部样本量,随机梯度下降就是batch_size = 1。
2.牛顿法
2.1 基本介绍
在最优化的问题中,线性最优化至少可以使用单纯行法求解,但对于非线性优化问题,牛顿法提供了一种求解的办法。假设任务是优化一个目标函数f,求函数f的极大极小问题,可以转化为求解函数f的导数f’=0的问题,这样求可以把优化问题看成方程求解问题(f’=0)。
为了求解f’=0的根,把f(x)的泰勒展开,展开到2阶形式:

这个式子是成立的,当且仅当 Δx 无线趋近于0。此时上式等价与:

求解:
得出迭代公式:

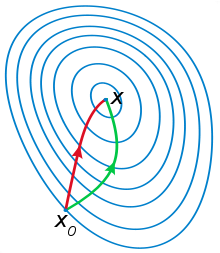
一般认为牛顿法可以利用到曲线本身的信息,比梯度下降法更容易收敛(迭代更少次数),如下图是一个最小化一个目标方程的例子,红色曲线是利用牛顿法迭代求解,绿色曲线是利用梯度下降法求解。
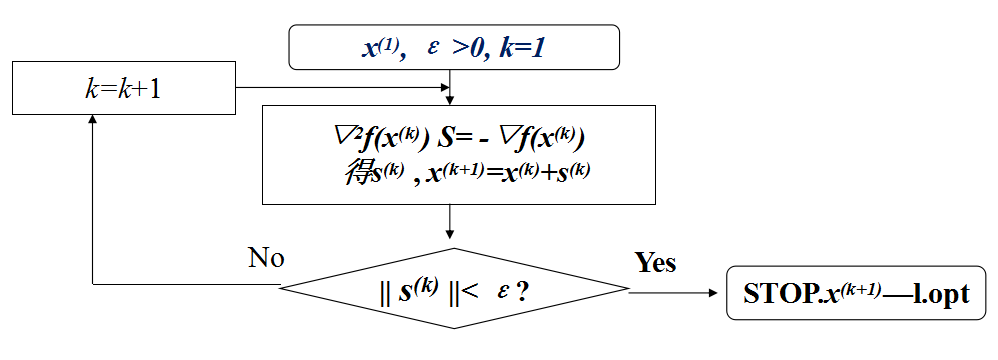
2.2 算法流程
2.3 特性
- 牛顿法收敛速度为二阶,对于正定二次函数一步迭代即达最优解。
- 牛顿法是局部收敛的,当初始点选择不当时,往往导致不收敛
- 牛顿法不是下降算法,当二阶海塞矩阵非正定时,不能保证产生方向是下降方向。
- 二阶海塞矩阵必须可逆,否则算法进行困难。
- 对函数要求苛刻(二阶连续可微,海塞矩阵可逆),而且运算量大。
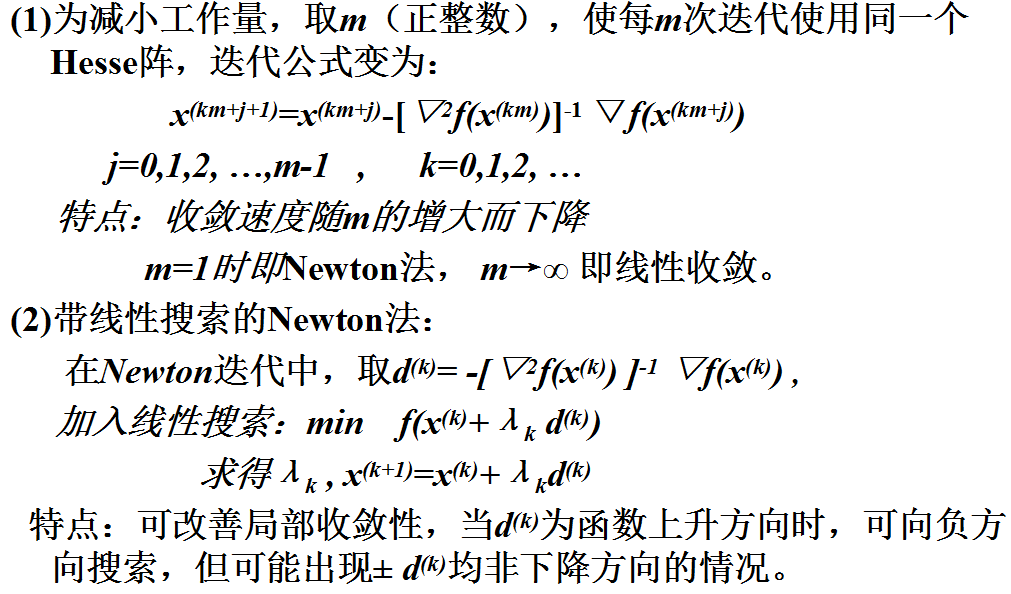
2.4 牛顿法的改进
3.拟牛顿法
3.1 特征
- 只需用到函数的一阶梯度;(Newton法用到二阶Hesse阵)
- 下降算法,故全局收敛;
- 不需求矩阵逆;(计算量小)
- 一般可达到超线性收敛;(速度快)
- 有二次终结性。
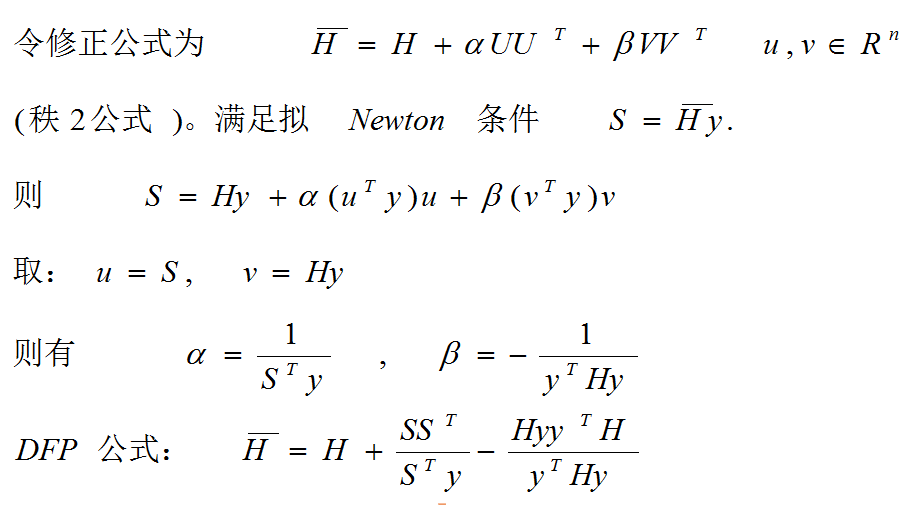
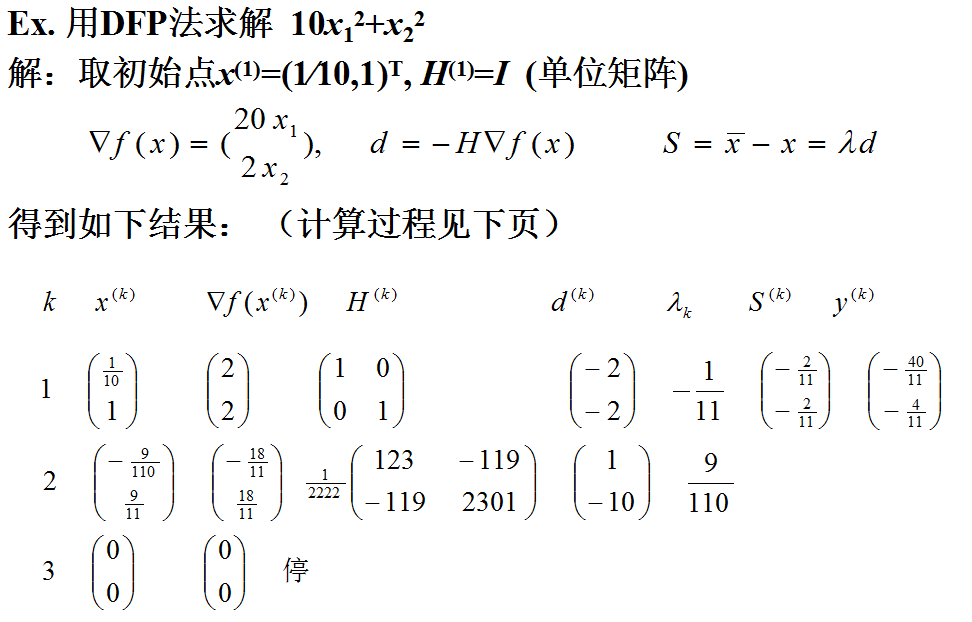
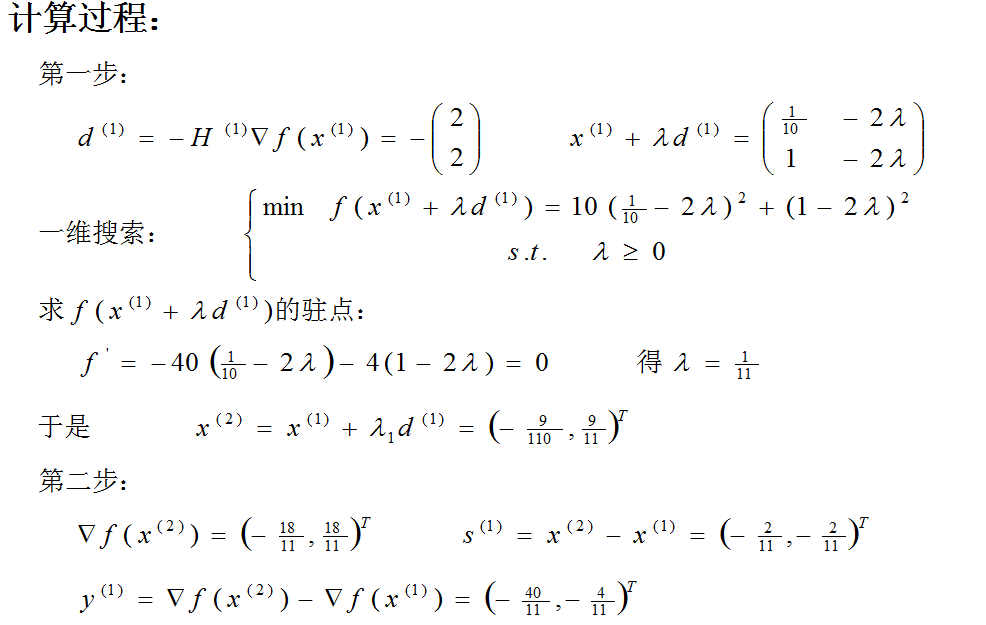
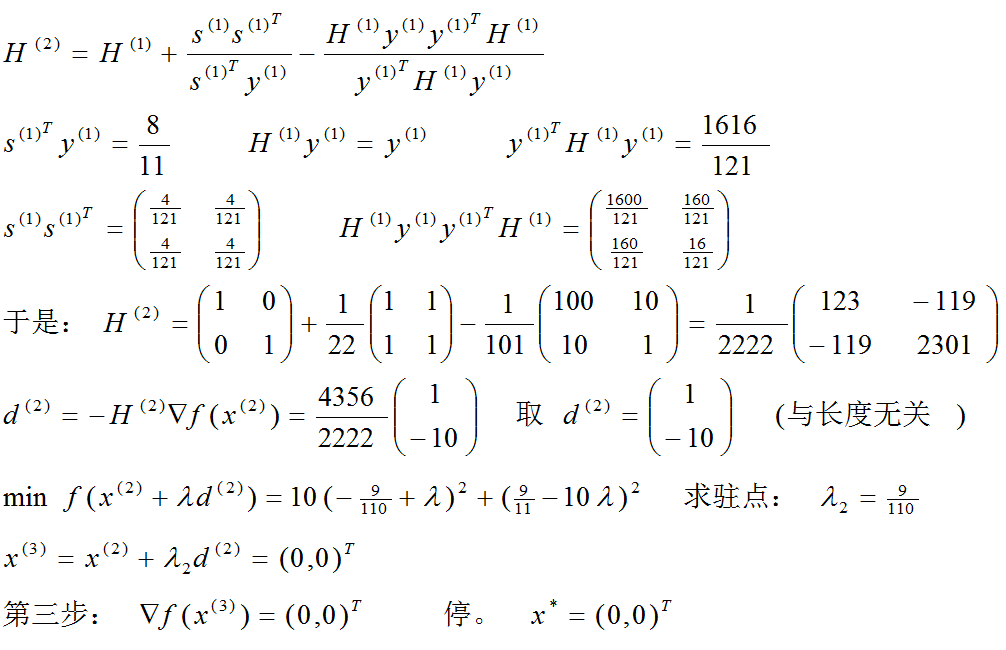
3.2 DFP法
x, s, y, H 表示第k 步的量,
3.3 BFGS法
若把前面的推导,平行地用在y=Bs公式上,可得到

用此公式求方向时,需用到矩阵求逆或解方程

由于每次只有秩2的变换,这里的计算量仍可以降下来。为了得到H-公式,可对上面求逆(推导得):

BFGS法有拟牛顿法的全部优点,并且在一定条件下可以证明在BFGS法中使用不精确一维搜索有全局收敛性。