版权声明:版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/ww1351646544/article/details/88670208
位置是怎么用矩阵是怎么变换到另一个坐标的?
想要定义一个空间,必须知道三个坐标轴的方向,而这些数值是相对于另一个坐标空间的。我们需要知道所有的空间都是相对的,即每一个坐标空间都是另一个坐标空间的子空间,反过来也可以说是父空间。
当给定一个点(a,b,c)时我们是怎么知道他的位置呢?
1.从坐标空间原点开始
2.向x轴方向移动a个单位
3.向y轴方向移动b个单位
4.向z轴方向 移动c个单位
比如,我们知道子坐标空间C的3个坐标轴在父坐标空间P下表示xc,yc,zc,以及原点O。当给定个子坐标空间中的一点Ac=(a,b,c)那我们同样可以按照上面的方法找到它在父空间的位置。
1.原点开始O
2.向x轴方向移动a个单位

3.向y轴移动b个单位
4.向z轴方向移动c个单位
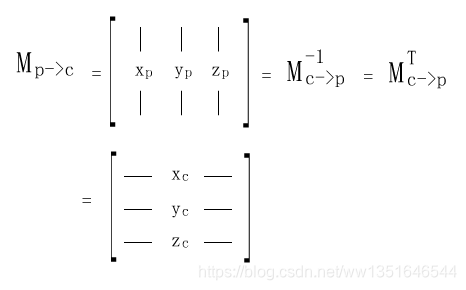
现在,我们得到了从空间C到空间P的矩阵:

当然了,我们还需要继续推导:
其实中“|”符号表示按列展开,由于我们要进行平需要把式子扩展到齐次坐标空间中:
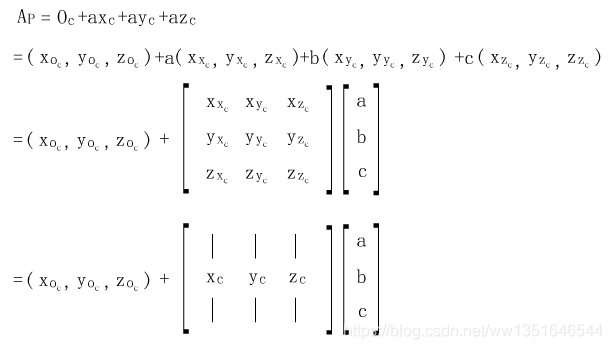
完后再与位移坐标相乘:
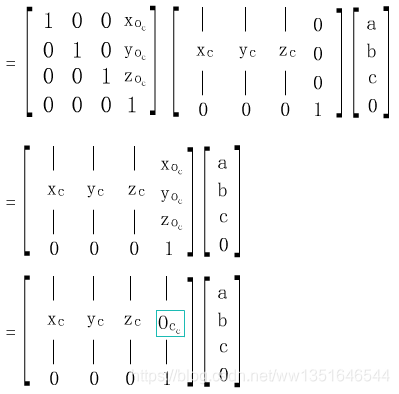
于是我们最终得出
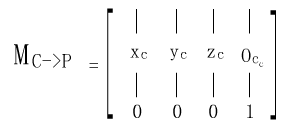
由此可以看出,空间变化实际上可以通过坐标空间的原和坐标失量构建出来,即:
把三个坐标轴入矩阵的前3列,把原点失量放到最后列,再用0和1填充最后一行即可。
这里我们没有要求三个坐标轴x、y、z是单位失量,事实上如果存在缩放,3个失量很可能不是单位失量。
当我们已知从模型空间到世界空间一个4X4的变换矩阵,可以提取它的第一列瑞进行归一化后来得到模型空间的x轴在世界空间下的单位失量表示。
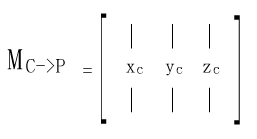
而对于模型空间的变换则可以直接用3X3的矩阵来表示
比方说一些点需要从模型空间变换到切线空间,就可以用到这个矩阵
下面是可以求出反向变换。