版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/lxn9492878lbl/article/details/84835188
真实的机器人的位置的话题和仿真器里的话题不一样,需要自己查找。
首先利用rosmsg找到有多少个消息
rosmsg list
接下来确定位置信息的消息类型为nav_msgs/Odometry,感觉只要和位置有关,要么是Odometry要么就是pose。
接下来利用rostopic find 命令找到使用这个消息类型的话题
rostopic find nav_msgs/Odometry
最后得到的tiago机器人的真是反馈位置信息的话题是
/mobile_base_controller/odom
然后
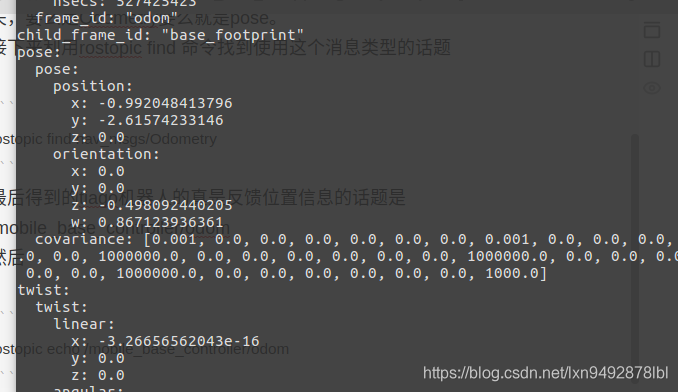
rostopic echo /mobile_base_controller/odom
就可以查看话题的内容,也即是位置的信息。