版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/flyfish1986/article/details/85706244
机器人 坐标
flyfish
图片部分来自wiki
一个点如果只在一维的轴上 只有一个数值

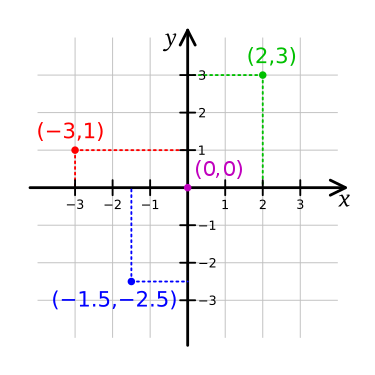
一个点如果在二维的平面上,那么它有两个值 X轴的坐标,Y轴的坐标
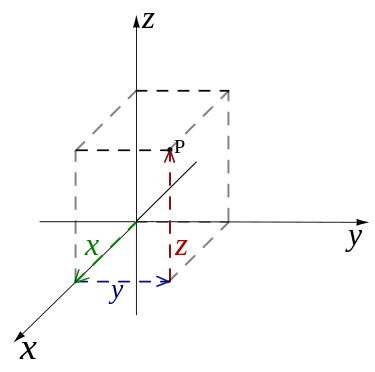
一个点如果在三维的立体空间中,那么它有三个值 X轴的坐标,Y轴的坐标,Z轴的坐标
视觉中的坐标系包括
世界坐标系
相机坐标系
图像物理坐标系
图像像素坐标系
| 坐标系名称 |
表示 |
原点 |
单位 |
| 世界坐标系 |
Ow(Xw,Yw,Zw) |
自定义 |
m |
| 相机坐标系 |
Oc(Xc,Yc,Zc) |
光心 |
m |
| 图像物理坐标系 |
O(X,Y) |
图像中点 |
mm |
| 图像像素坐标系 |
uv |
图像左上角 |
pixel |
图像像素坐标系与图像物理坐标系
u=dxx+u0
v=dyy+v0
⎣⎡uv1⎦⎤=⎣⎡dx1000dy10u0v01⎦⎤⎣⎡xy1⎦⎤
图像物理坐标系与相机坐标系
fx=ZCXC
fy=ZCYC
ZC⎣⎡xy1⎦⎤=⎣⎡f000f0001000⎦⎤⎣⎢⎢⎡XCYCZC1⎦⎥⎥⎤
相机坐标系与世界坐标系
⎣⎢⎢⎡XCYCZC1⎦⎥⎥⎤=[R0Tt1]⎣⎢⎢⎡XYZ1⎦⎥⎥⎤
球坐标系(spherical coordinate system)
齐次坐标(射影坐标 homogeneous coordinates or projective coordinates)
projective plane
投影平面
就像火车的两条铁轨,如果在平面绘图出来时,这两条平行的铁轨似乎在“无限远” 的消失点处相交。
就跟 绘画透视技法 一样
projective
英 /prə’dʒektɪv/ 美 /prə’dʒɛtɪv/
adj. 投影的;投射的;反映主观的
vanishing
/'vænɪʃ/
adj. 消没的
n. 消失
v. 消失(vanish的ing形式
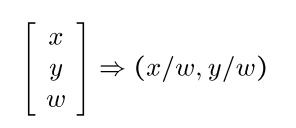
齐次坐标:(x,y,w) 到 笛卡尔坐标:(x/w,y/w)
就像一个三维的点映射到二维是如何表示的。
f(λx,λy,λz)=λkf(x,y,z).
机械臂的旋转可以用 旋转矩阵(3*3)、欧拉角、四元数表示,相当于姿态
加上位置转换成4 乘 4的矩阵
R=⎣⎡AxAyAzBxByBzCxCyCz⎦⎤
result=⎣⎢⎢⎡AxAyAz0BxByBz0CxCyCz0pxpypz1⎦⎥⎥⎤