- Harris角点检测算子是于1988年由CHris Harris & Mike Stephens提出来的。在具体展开之前,不得不提一下Moravec早在1981就提出来的Moravec角点检测算子。
- 角点的作用:
角点是图像的很重要的局部特征,它决定图像中目标的形状。常用于三维场景重建,运动估计,目标跟踪,目标识别,图像配准等。
Moravec角点检测算子
(可以参考:https://blog.csdn.net/f290131665/article/details/80064479 )
1. Moravec基本原理
Moravec是一种基于灰度方差的角点检测算子,该算子计算图像中某个像素点沿着水平、垂直、对角线、反对角线四个方向的灰度方差,其中的最小值选为该像素点的兴趣值,再通过局部非极大值抑制来检测是否为角点。
2. Moravec计算过程
Moravec角点检测算子的思想其实特别简单,在图像上取一个
*
的 “滑动窗口” (比如 5x5),计算水平、垂直、对角线、反对角线四个方向的相邻像素灰度差的平方和,不断的移动这个窗口并检测窗口中的像素变化情况E。像素变化情况E可简单分为以下三种:
A) 如果在窗口中的图像是平坦的,那么E的变化不大。
B) 如果在窗口中的图像是一条边,那么在沿这条边滑动时E变化不大,而在沿垂直于这条边的方向滑动窗口时,E的变化会很大。
C) 如果在窗口中的图像是一个角点时,窗口沿任何方向移动E的值都会发生很大变化。
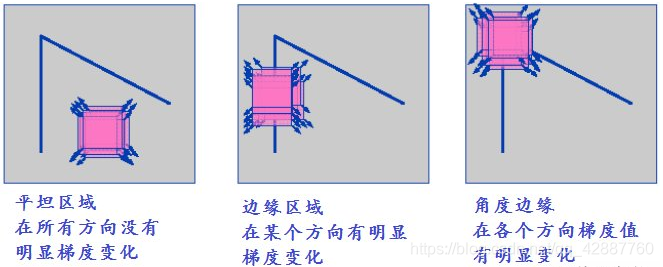
3. 上图就是对Moravec算子的形象描述。用数学语言来表示的话就是:


其中(
,
)就表示四个移动方向水平(1,0)、对角线(1,1)、垂直(0,1)、反对角线(-1,1),E就是像素的变化值。Moravec算子对四个方向进行加权求和来确定变化的大小,然和设定阈值,来确定到底是边还是角点。
4. Moravec优点和缺点
优点:计算速度快。
缺点:
1. 由于窗口是方形并且二元的,因此对图像噪声敏感。
2. 有方向上的局限性。只有离散的8个45度角方向被考虑。
3. 对边缘的相应太简单
Harris角点检测算子
Harris角点检测算子实质上就是对Moravec算子的改良和优化。
-
1.对Moravec算子中提到的公式,做进一步解释
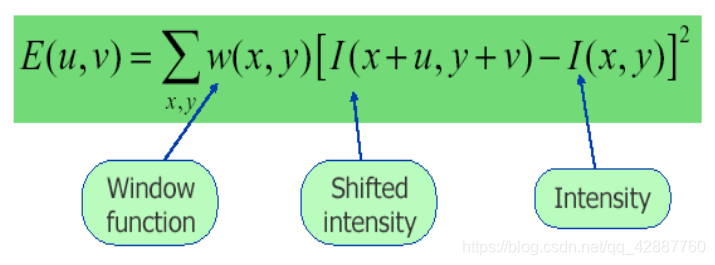
1) 对于 平移 个单位后强度的变换有下式, 是平移后的强度, 是原图像像素。对于括号里面的值,如果是强度恒定的区域,那么它就接近于零,反之如果强度变化剧烈那么其值将非常大,所以我们期望 很大。
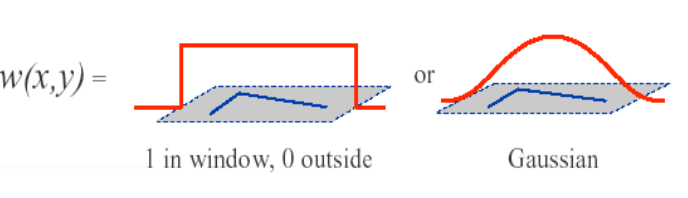
2) 其中 是窗函数,窗口函数是一个矩形窗口或高斯窗口,它给在其中的像素加权。它可以是加权函数,也可以是高斯函数。
-
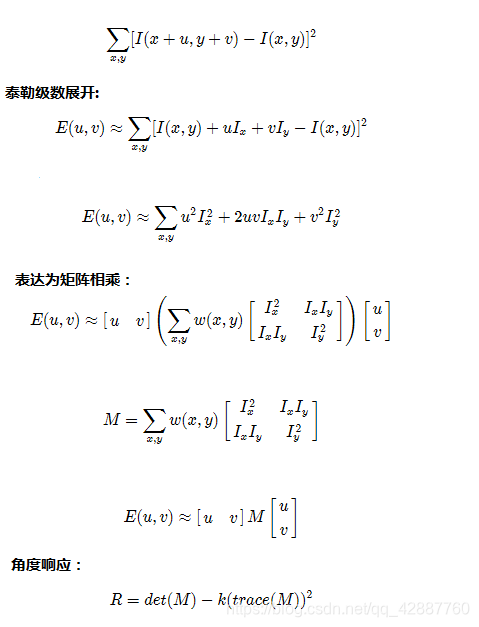
2.我们必须使边角检测的函数 最大化,这意味着,我们必须最大限度地利用第二个参数。将泰勒展开式应用于上述方程并使用一些数学步骤,我们的最终方程式为:
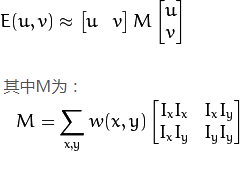
这里 和 分别是在x和y方向上的导数(使用cv2.Sobel()可以得到)。 -
3.然后是主要部分。在此之后,他们创建了一个分数,基本上是一个等式,它将决定一个窗口是否可以包含边角。
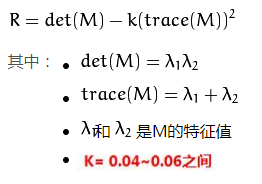
所以这些特征值的值决定了一个区域是角落,边缘还是平面。- 当 | R | 很小,也就是介于 1 和 2 之间,该区域是平面.
- 当 R<0 ,也就是当 1>> 2 或相反时,该区域是边缘.
- 当 R 很大,即当 1 和 2 都很大并且R介于 1 ~ 2 之间, 该区域是边角.
可以如下图表示:

-
算法详细步骤
第一步:计算图像X方向与Y方向的一阶高斯偏导数 与
第二步:根据第一步结果得到 2 , 2 与 值
第三步:高斯模糊第二步三个值得到
第四部:定义每个像素的Harris矩阵,计算出矩阵的两个特质值
第五步:计算出每个像素的R值
第六步:使用3X3或者5X5的窗口,实现非最大值压制
第七步:根据角点检测结果计算,最提取到的关键点以绿色标记,显示在原图上。 -
对于2中的具体推导步骤可以参考:https://www.cnblogs.com/klitech/p/5779600.html
API参数说明
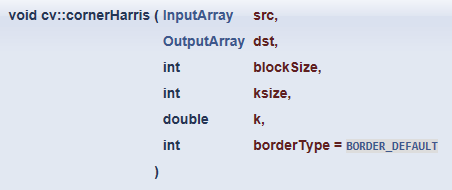
void cornerHarris ( // harris角点检测
InputArray src, // 彩色图与灰度图都可以,最好是灰度图
OutputArray dst, // 输出图像,计算出来的值可能正负,可能有小数,所以输入图像深度最好为 CV_32F,输出图形深度与输入一致
int blockSize, // -blockSize – 计算 λ1 λ2 时候的矩阵大小
int ksize, // -Ksize 窗口大小
double k, // -K表示计算角度响应时候的参数大小 默认在0.04~0.06
int borderType = BORDER_DEFAULT
);
• img - 输入图像,应该是 灰度 和 float32 类型
• blockSize - 角点检测中要考虑的领域大小。即 计算
1
2 时候的矩阵大小
• ksize - Sobel 求导中使用的窗口大小
• k - Harris 角点检测方程中的自由参数,参数默认取值在[0,04,0.06]
程序代码
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
Mat src, gray_src;
int thresh = 130;
int max_count = 255;
const char* output_title = "HarrisCornerDetection Result";
void Harris_Demo(int, void*);
int main(int argc, char** argv) {
src = imread("E:/Experiment/OpenCV/Pictures/cornerHarrisTest.jpg");
if (src.empty()) {
printf("could not load image...\n");
return -1;
}
namedWindow("input image", CV_WINDOW_AUTOSIZE);
imshow("input image", src);
namedWindow(output_title, CV_WINDOW_AUTOSIZE);
cvtColor(src, gray_src, COLOR_BGR2GRAY);
createTrackbar("Threshold:", output_title, &thresh, max_count, Harris_Demo);
Harris_Demo(0, 0);
waitKey(0);
return 0;
}
void Harris_Demo(int, void*) {
Mat dst, norm_dst, normScaleDst;
dst = Mat::zeros(gray_src.size(), CV_32FC1);
int blockSize = 2;
int ksize = 3;
double k = 0.04;
cornerHarris(gray_src, dst, blockSize, ksize, k, BORDER_DEFAULT);// 角点检测
//printf("dst depth=%d, type=%d\n", dst.depth(), dst.type()); // dst depth=5, type=5 CV_32F
normalize(dst, norm_dst, 0, 255, NORM_MINMAX, CV_32FC1, Mat()); // 检测出的元素值范围不确定,而且有正有负,归一化一下
//printf("norm depth=%d, type=%d\n", norm_dst.depth(), norm_dst.type()); // norm depth=5, type=5 CV_32F
convertScaleAbs(norm_dst, normScaleDst); // 将元素值取绝对值,且将输出图像深度变为 CV_8U 公式:dst(I)=abs(src(I)*scale + shift)
//printf("scaleDst depth=%d, type=%d\n", normScaleDst.depth(), normScaleDst.type()); // scaleDst depth=0, type=0 CV_8U
Mat resultImg = src.clone();// 深拷贝
for (int row = 0; row < resultImg.rows; row++) {
uchar* currentRow = normScaleDst.ptr(row);
for (int col = 0; col < resultImg.cols; col++) {
int value = (int)*currentRow;
if (value > thresh) {// 过滤,角点响应值 大于 阈值才显示
circle(resultImg, Point(col, row), 2, Scalar(0, 0, 255), 2, 8, 0);
}
currentRow++;// scaleDst的深度是CV_8U , 所以用 ++ 指针步长没有问题
}
}
imshow(output_title, resultImg);
}
运行截图

参考博客
- https://blog.csdn.net/yudingjun0611/article/details/7991601
- https://blog.csdn.net/f290131665/article/details/80064479
- https://blog.csdn.net/ssw_1990/article/details/70155210
- https://blog.csdn.net/u014403318/article/details/80562785
- https://www.cnblogs.com/klitech/p/5779600.html
- https://www.aliyun.com/jiaocheng/1343014.html
- https://blog.csdn.net/huanghuangjin/article/details/81261258