一.特征检测(提取)
基于特征的图像配准方法是图像配准中最常见的方法之一。它不是直接利用图像像素值,二十通过像素值导出的符号特征(如特征点、特征线、特征区域)来实现图像配准,因此可以克服利用灰度信息进行图像配准的缺点,主要体现在以下三个方面:(1)利用特征点而不是图像灰度信息,大大减少了在匹配过程中的计算量;(2)特征点的匹配度量值相对位置变化比较敏感,可以提高匹配的精度;(3)特征点的提取过程可以减少噪声的影响,对灰度变化、图像形变以及遮挡等都有较好的适应能力。
一类重要的点特征:角点(corner points),其定义主要有以下:
- 局部窗口沿各方向移动,灰度均产生明显变化的点
- 图像局部曲率突变的点
- 典型的角点检测算法:Harris角点检测、CSS角点检测
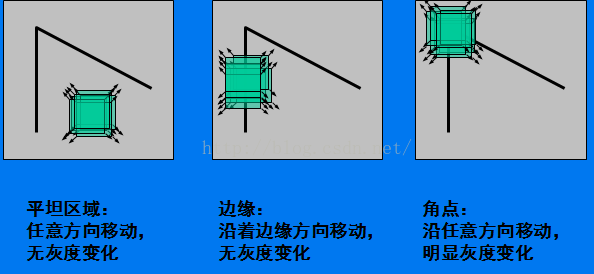
- Harris角点检测基本思想
从图像局部的小窗口观察图像特征,角点定义:窗口向任意方向的移动都导致图像灰度的明显变化(如下图)
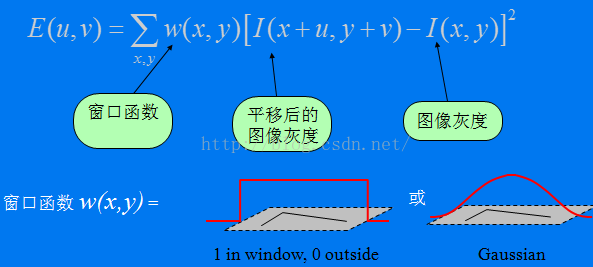
Harris检测:数学表达
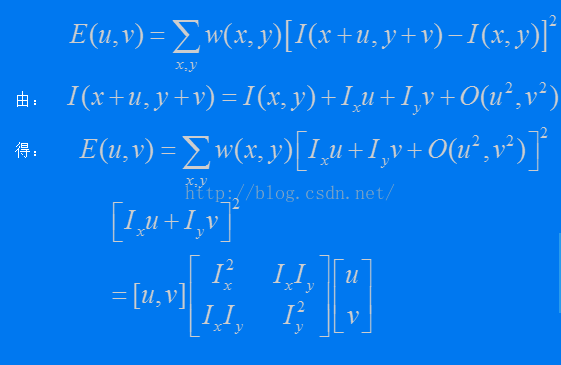
将图像窗口平移[u,v]产生灰度变化E(u,v)
由泰勒展开,得:
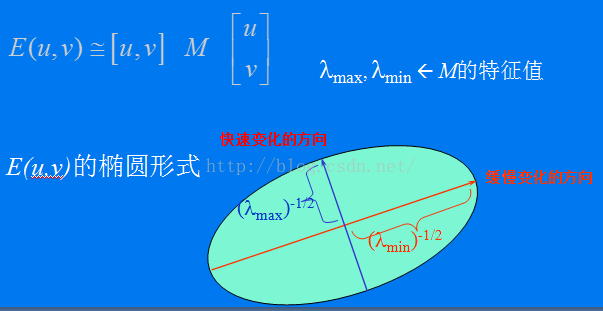
利用角点响应函数:
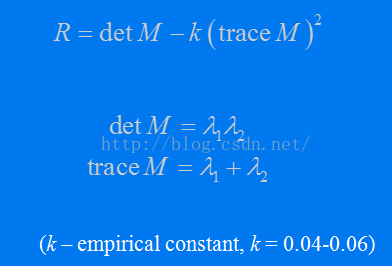
判断特征点是否为角点的依据:R只与M值有关,R为大数值正数时特征点为角点,R为大数值负数时为边缘,R为小数值时为平坦区,如下图:
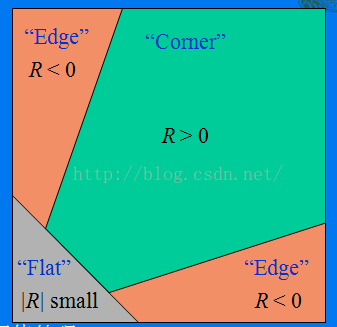
寻找R位于一定阈值之上的局部最大值,去除伪角点。
Harris角点检测流程:
1.通过高斯函数的导数对原始图像进行卷积计算;图像在水平方向和垂直方向的导数Ix和Iy;
2.计算对应这些梯度外积即(Ix2 、Iy2、IxIy)三个图像如下图:
4.使用高斯函数对以上图像进行卷积滤波;
3.使用前面的公式计算角点响应函数R值;
5.对计算到的角点图像进行局部极大值抑制。
二、特征描述
在检测到特征(关键点)之后,我们必须匹配它们,也就是说,我们必须确定哪些特征来自于不同图像中的对应位置。物体识别的核心问题是将同一目标在不同时间、不同分辨率、不同光照、不同位姿情况下所成的图像相匹配。而为了进行匹配,我们首先要合理的表示图像。
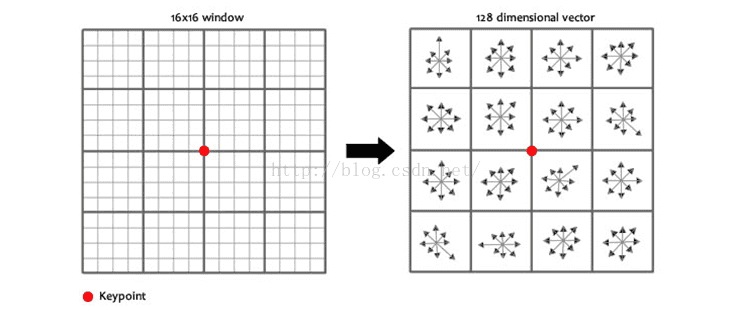
SIFT(Scale invariant feature transform)特征通过计算检测到的关键点周围16x16窗口内每一个像素的梯度得到。在这里我只是简单的实现类似于SIFT特征描述子的特征描述方法,即我通过每4x4的四分之一象限,通过将加权梯度值加到直方图八个方向区间中的一个,计算出一个梯度方向直方图,因此在每一个特征点都会形成一个128维的非负值形成了一个原始版本的SIFT描述子向量如下图,并且将其归一化以减少对比度和增益的影响,最后为了使描述子对其他各种光度变化鲁棒,再将这些值以0.2截尾,然后再归一化到单位长度。
三、特征匹配
一旦我们从两幅或者多幅图像中提取到特征及其描述子后,下一步就是要在这些图像之间建立一些初始特征之间的匹配。
匹配策略一:对前面提取到的两幅图像的128维特征描述子向量做欧式距离度量,最简单的一个策略就是先设定一个阈值(最大距离),然后返回在这个阈值范围之内的另外一个图像中的所有匹配。
匹配策略二:做最近邻匹配,即比较最近邻距离和次近邻距离的比值,即最近邻比率(NNDR)。
匹配策略一的缺点是,如果阈值设得太高,就会产生误报,也就是说会出现不正确的匹配。如果阈值设得太低,就会产生很多“漏报”,也就是说,很多正确的匹配被丢失。
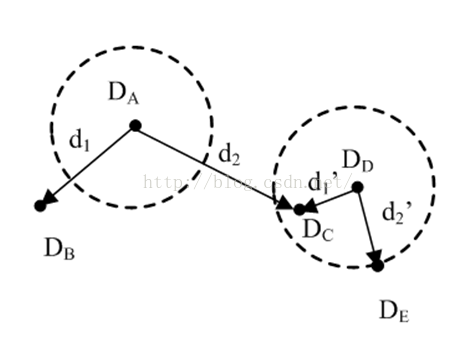
固定阈值,最近邻和最近邻比率匹配。在固定阈值(虚线圆)下,描述子DA未能与DB匹配,DD错误地与DC和DE匹配。如果我们选择最近邻,DA和DE匹配。使用最近邻比率(NNDR),小的NNDR(d1/d2)正确地将DA和DB匹配,大的NNDR(d1'/d2')正确地拒绝DD与DC、DE的匹配。
代码如下: