Harris角点检测
Harris角点检测理论(1998提出)
参数说明
代码演示
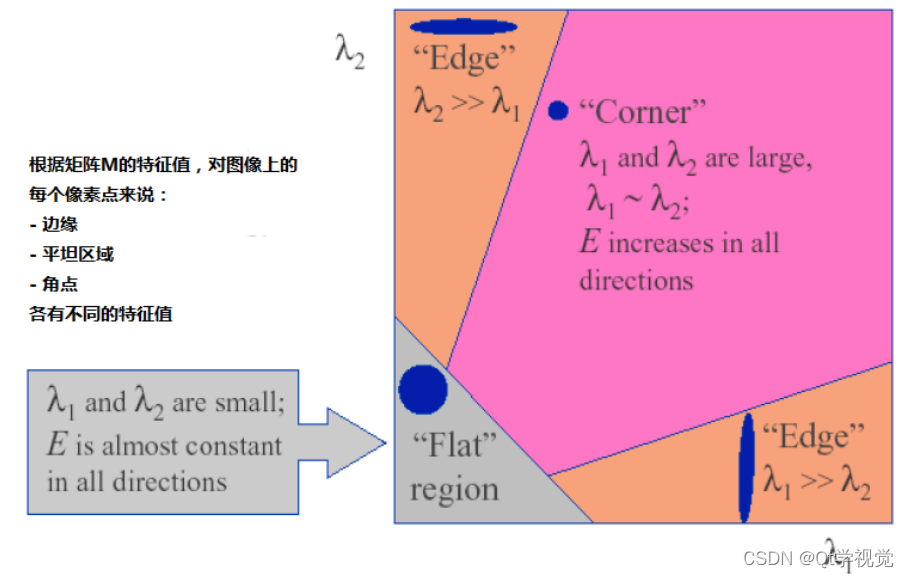
Harris角点检测理论
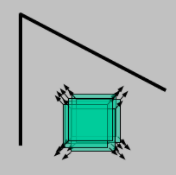
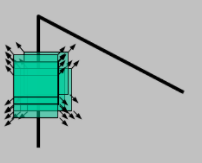
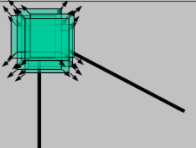
人眼对角点的识别通常是在一个局部的小区域或小窗口完成的。如果在各个方向上移动这个特征的小窗口,窗口内区域的灰度发生了较大的变化,那么就认为在窗口内遇到了角点。如果这个特定的窗口在图像各个方向上移动时,窗口内图像的灰度没有发生变化,那么窗口内就不存在角点;如果窗口在某一个方向移动时,窗口内图像的灰度发生了较大的变化,而在另一些方向上没有发生变化,那么,窗口内的图像可能就是一条直线的线段。如下图:
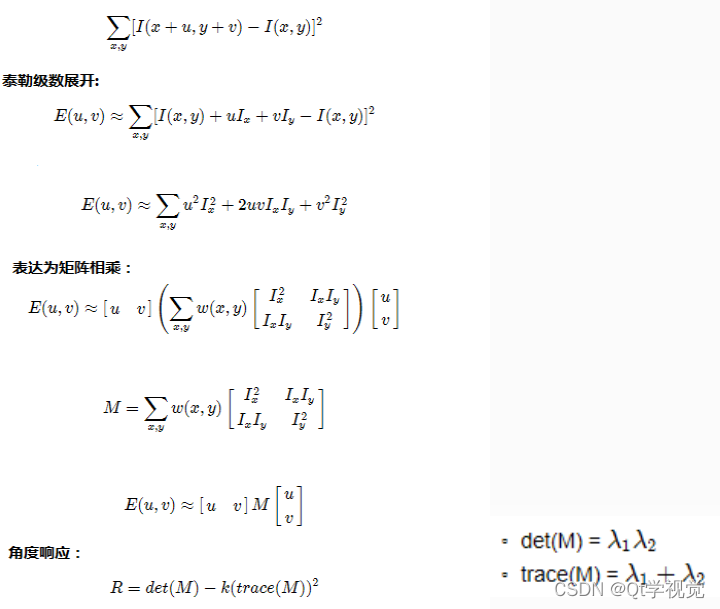
 其中,I(x,y)表示像素的灰度值
其中,I(x,y)表示像素的灰度值
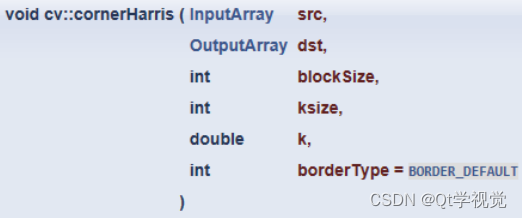
-blockSize – 计算时候的矩阵大小
-Ksize 窗口大小
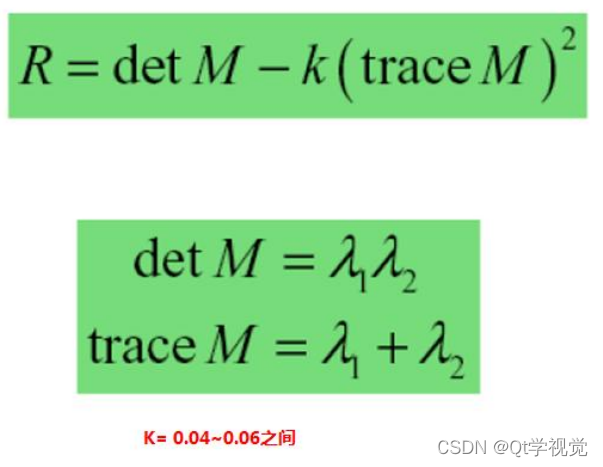
-K表示计算角度响应时候的参数大小,默认在0.04~0.06
- 阈值t,用来过滤角度响应
角点检测代码
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
Mat src, gray_src;
int thresh = 130;
int max_count = 255;
const char* output_title = "HarrisCornerDetection Result";
void Harris_Demo(int, void*);
int main(int argc, char** argv) {
src = imread("D:/vcprojects/images/home.jpg");
if (src.empty()) {
printf("could not load image...\n");
return -1;
}
namedWindow("input image", CV_WINDOW_AUTOSIZE);
imshow("input image", src);
namedWindow(output_title, CV_WINDOW_AUTOSIZE);
cvtColor(src, gray_src, COLOR_BGR2GRAY);
createTrackbar("Threshold:", output_title, &thresh, max_count, Harris_Demo);
Harris_Demo(0, 0);
waitKey(0);
return 0;
}
void Harris_Demo(int, void*) {
Mat dst, norm_dst, normScaleDst;
dst = Mat::zeros(gray_src.size(), CV_32FC1);
int blockSize = 2;
int ksize = 3;
double k = 0.04;
cornerHarris(gray_src, dst, blockSize, ksize, k, BORDER_DEFAULT);
normalize(dst, norm_dst, 0, 255, NORM_MINMAX, CV_32FC1, Mat());
convertScaleAbs(norm_dst, normScaleDst);
Mat resultImg = src.clone();
for (int row = 0; row < resultImg.rows; row++) {
uchar* currentRow = normScaleDst.ptr(row);
for (int col = 0; col < resultImg.cols; col++) {
int value = (int)*currentRow;
if (value > thresh) {
circle(resultImg, Point(col, row), 2, Scalar(0, 0, 255), 2, 8, 0);
}
currentRow++;
}
}
imshow(output_title, resultImg);
}个人自学代码
void DlgImageProcessing::on_btnHarris_clicked()
{
if (m_srcImage.data)
{
Mat grayImage;
if (m_srcImage.type() != CV_8UC1)
{
cvtColor(m_srcImage, grayImage, COLOR_RGB2GRAY);
}
else
{
grayImage = m_srcImage.clone();
}
Mat dstImage = Mat::zeros(grayImage.size(), CV_32FC1);
//harris角点核心函数
int blockSize = 2;//矩阵大小
int ksize = 3;//窗口大小
int k = 0.04;//计算角度响应时候的参数大小,默认在0.04~0.06
cornerHarris(grayImage, dstImage, blockSize, ksize, k, BORDER_DEFAULT);
//上述输出的取值范围并不是0-255 需要按照最大最小值进行归一化
Mat normImage, normScaleDst;
normalize(dstImage, normImage, 0, 255, NORM_MINMAX, CV_32FC1, Mat());
convertScaleAbs(normImage, normScaleDst);
Mat resultImg = m_srcImage.clone();
int thresholdValue = ui.horizontalSliderThresholdValue->value();
RNG rng(12345); //用彩色来显示
for (int row = 0; row < resultImg.rows; row++)
{
//定义每一行的指针
uchar* currentRow = normScaleDst.ptr(row);
for (int col = 0; col < resultImg.cols; col++)
{
int value = (int)*currentRow;
if (value > thresholdValue)
{
circle(resultImg, Point(col, row), 2, Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255)), 2, 8, 0);
}
currentRow++;
}
}
emit ShowImage(resultImg);
cvtColor(resultImg, resultImg, COLOR_RGB2BGR);
cv::imshow("this result", resultImg);
}
}