Apollo预测主要是指 通过预测人车辆或其它物体的运动轨迹。而进一步对车辆的路径进行生成。预测路径有实时性的要求
预测的方法主要有:
基于模型的方法:比如决策树,分层判断其将会行走的路线
数据驱动的方法:CNN、RNN训练

预测的信息依据
- 车道线的预测(lane sequence)
首先将复杂的车辆运动转化为车道序列的预测。就是预测车会继续在他车道走,还是会转换车道。

- 障碍物的状态(obstacle status)
包括判断物体的位置、朝向、速度、加速度等等

RNN(递归神经网络)
Apollo使用RNN来建立一个模型 来预测车辆的目标车道
扫描二维码关注公众号,回复:
4778839 查看本文章

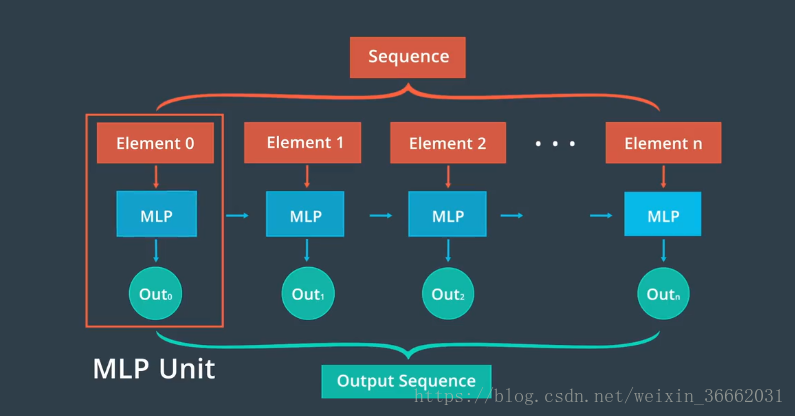
通过观察物体的状态和车道线的序列,送入到RNN中进行训练,再将其结合起来,进而预测。

轨迹生成
轨迹生成是预测的最后一步
一旦我们预测到物体的车道序列,我们就可以预测物体的轨迹,在任何两点 A 和 B 之间,物体的行进轨迹有无限的可能,我们如何预测最有可能的轨迹?

我们可以先通过设置约束条件(当时的速度加速度),来去除大部分候选轨迹,(车辆无法实际执行的轨迹)

根据车辆在两点的位置和方位。这两个姿势表示运动模型的初始状态和最终状态,
我们可以使用这两个条件来拟合一个多项式模型,在大多数情况下 这种多项式足以进行预测
同时 自动驾驶将不同传感器的信息进行融合,之后再传入计算,进而确定路径,目标等。
