预测
预测简介
在车辆运行的过程中,存在很多正在发生变化的因素,比如行人和其他车辆的运动轨迹,无人驾驶车辆需要对这些运动的对象进行运动轨迹的预测,来实现更好的路线规划。车辆的预测需要具有实时性。
不同的预测方式
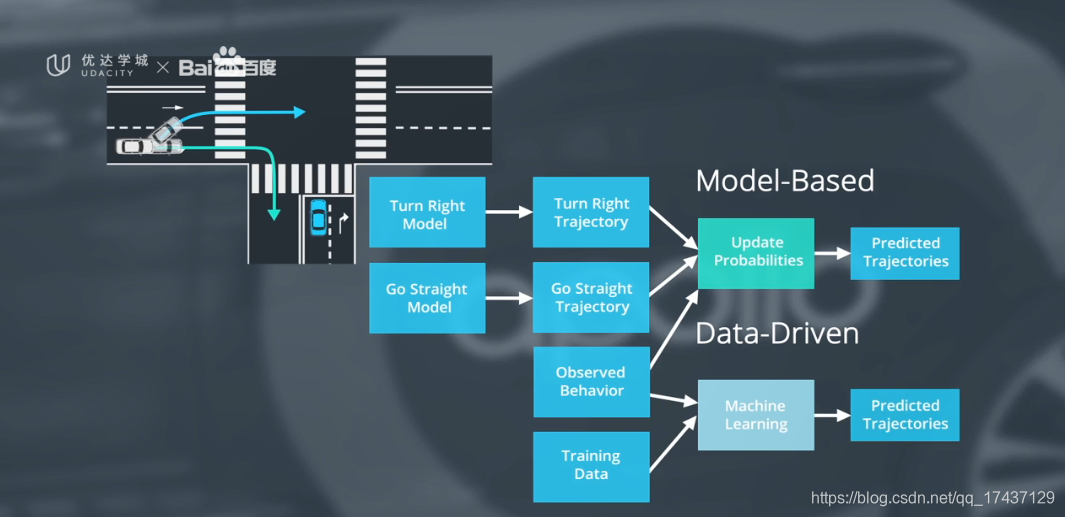
预测的两种方式分别是:基于模型,数据驱动。
①基于模型:对观测的车辆进行可能做出的反应分类,并构建相对应的模型,对车辆的下一步行为进行预测。
②数据驱动:基于机器学习模型,通过对大量的数据进行模型训练,最终得到准确的信息。
基于车道的预测
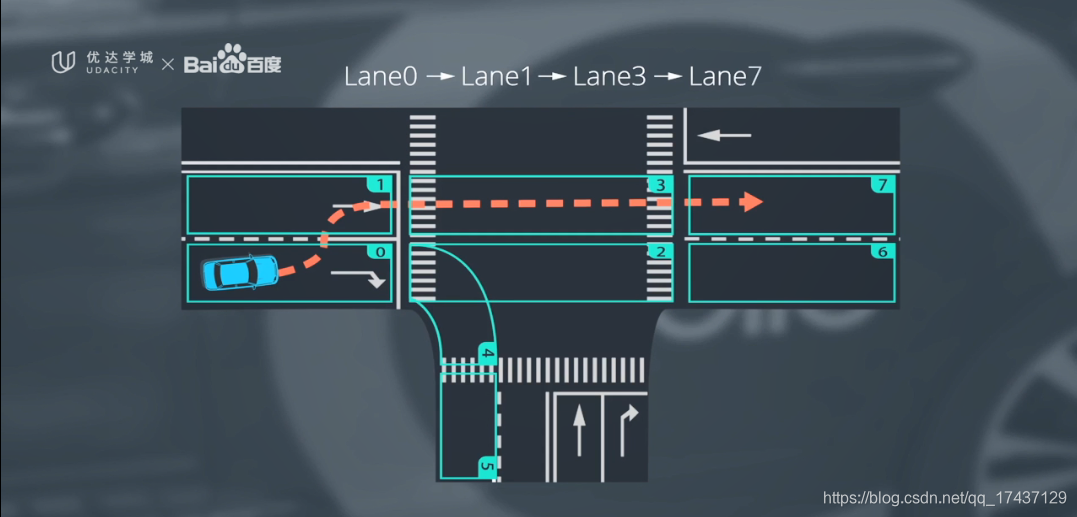
Apollo提供了一种叫基于车道序列的方法,建立车道序列,我们会将道路分为多个部分,每一个部分都涵盖描述汽车运动的区域,我们的目的便是为道路上的物体生成轨迹。
障碍物状态
无人驾驶车辆需要实时知道物体的状态。让人驾驶汽车时,我们通过观察一个物体的朝向、位置、速度和加速度来预测它将会做什么。同样的,无人车也需要一辆无人驾驶车如何观察物体的状态。当然除了观察以上人类观察的行为,还需要预测模块来考虑物体车道线边界的纵向和横向距离,预测模块还包含之前时间间隔的状态信息,以便做出更准确的预测。
预测目标车道
递归神经网络
递归神经网络一种利用时间序列数据特征的预测方法。神经网络是一种可训练的多层模型。其结构为:得到输入 、将数据经过隐藏层处理 、得到输出。
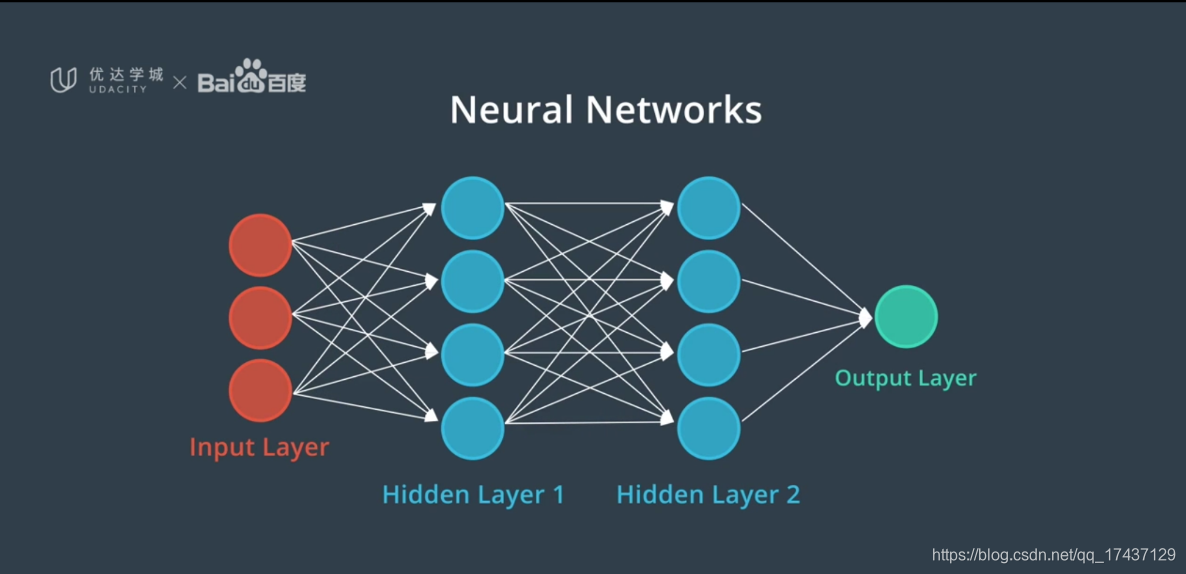
后向传播:神经网络从数据中学习的方式 ,可以在未来提高神经网络的准确率。步骤为:
1、神经网络得到输入并产生输出
2、计算机比较输出与真值之间的误差
3、误差通过后向传回整个网络
4、隐藏层根据观察到的差别调整其中的中间 值(权重)
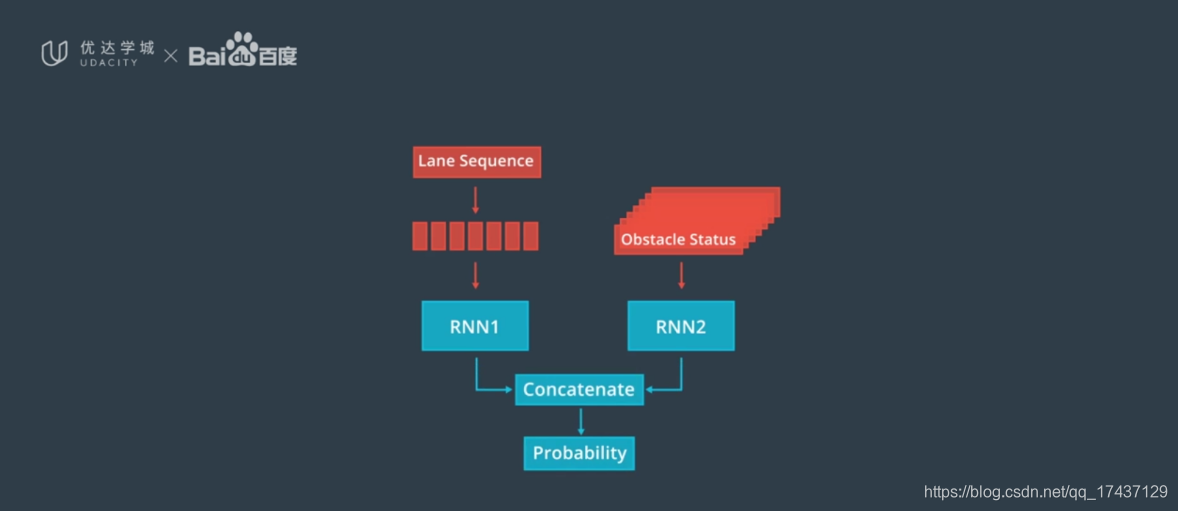
神经网络在预测车辆的目标道路上的应用
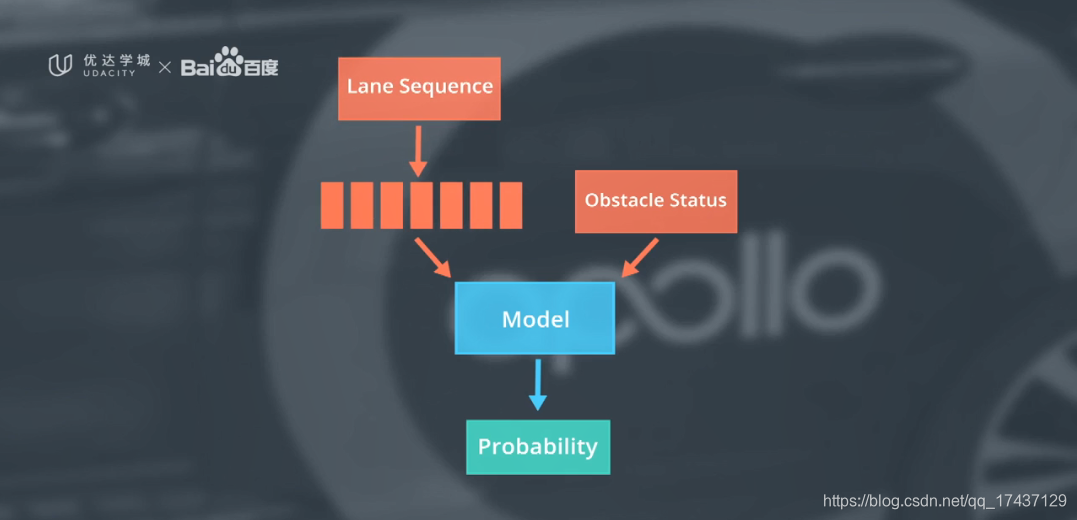
1、为车道序列提供一个RNN模型
2、为相关对象状态提供另一个RNN模型
3、连接两个RNN的输出并将它们馈送到另一个 神经网络
4、该网络估计每个车道序列的概率,遵循具有 最高概率的车道序列 训练模型的数据 车道序列 相关的对象状态 标签
轨迹生成
通过两点间的位置设置条件,建立多项式模型, 生成轨迹、首先设置约束条件,去除大部分候选轨迹 ,随后去除车辆无法实际执行的轨迹 。接着通过考虑车辆当前速度和加速度从剩余的轨迹中进行选择。