将预测问题简化为选择问题——Apollo车道预测详解
预测: 预测环境中移动物体的行为,以确保无人车做出最佳的决策,通过生成一条路径来预测移动物体的行为。根据其他物体的状态以及自己的状态来预测它们的路径。
预测要求实时、准确,且能从其他情况中学习新的预测行为。
预测分为基于物理模型的和数据驱动的。

Apollo基于车道序列的预测
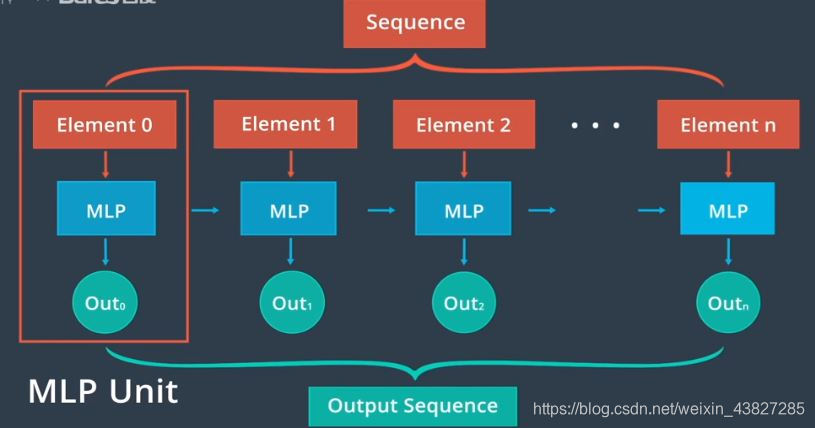
预测障碍物状态:位置,朝向,速度,加速度,车道段内物体的位置以及之前时间间隔的状态信息来做出更好的预测。
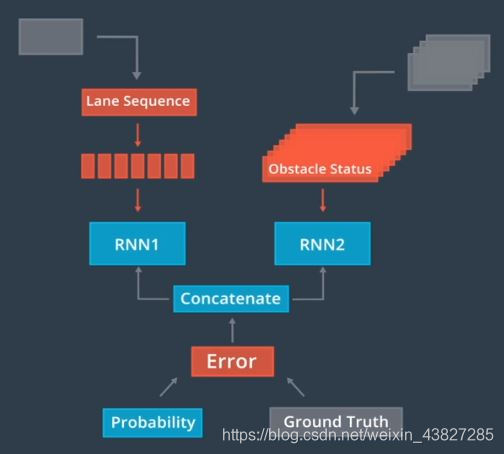
RNN在目标车道预测的应用:车道序列RNN1,相关对象状态RNN2,连接起来输入到另一个神经网络,该网络会估计每个车道序列的概率,最高
概率的车道序列是预测目标车辆将遵循的序列。
轨迹生成:根据预测的最终状态和感知的初始状态,多项式拟合很多条轨迹,再根据运动约束选择最优轨迹。
