MPC : Model Prective Control (模型预测控制)
作用:工业控制,自适应控制,内模控制
特点:基于闭环优化控制策略 注:闭环(闭环结构)也叫反馈控制系统,是将系统输出量的测量值与所期望的给定值相比较,由此产生一个偏差信号,利用此偏差信号进行 调节控制,使输出值尽量接近于期望值。
组成
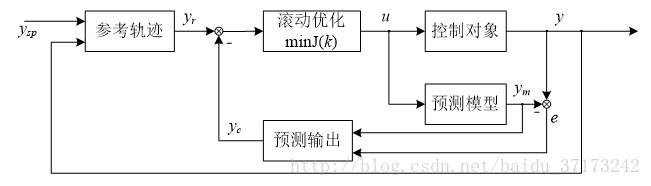
滚动优化:预测控制的一次优化不是一次离线进行的,而是随着采样时刻的前进反复地在线运行。滚动优化与全局优化不同,滚动优化在每一个时刻的优化指标只涉及从当前时刻起到未来的某个时间内,而到了下一时刻,这一优化时刻同事向前推移,不断进行在线优化。