版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/Apple_hzc/article/details/84144712
一、Deeplearning-assignment
在本次作业中,我们将学习如何通过残差网络(ResNets)建立更深的卷及网络。理论上,深层次的网络可以表示非常复杂的函数,但在实践中,他们是很难创建和训练的。残差网络使得建立比以前更深层次的网络成为可能。对于残差网络的详细讲解,具体可参考该论文:Deep Residual Learning for Image Recognition
在这个任务中,您将:
- 实现ResNets的基本构建块。
- 整理这些构建块来实现和训练图像分类的最先进的神经网络。
随着神经网络层数的递增,它越来越能实现一些很复杂的函数功能,它可以在很多不同的抽象层学习特征(从低层到高层),但也随之带来一些问题。在某些时候,深层神经网络并不会出现好的效果,比如一个巨大的障碍就是会出现梯度消失的问题。
很深的网络常常会有一个梯度迅速趋于零的时候,从而使梯度下降的过程变得相当缓慢。更具体地说,在梯度下降过程中,从最后一层backprop回到第一层,每一步乘以权重矩阵,从而能够迅速减少指数梯度为零(或者,在某些情况下,成倍增长迅速)。

现在你需要通过建立一个残差网络来解决问题。

二、相关算法代码
import numpy as np
from keras import layers
from keras.layers import Input, Add, Dense, Activation, ZeroPadding2D, BatchNormalization, Flatten, Conv2D, \
AveragePooling2D, MaxPooling2D, GlobalMaxPooling2D
from keras.models import Model, load_model
from keras.preprocessing import image
from keras.utils import layer_utils
from keras.utils.data_utils import get_file
from keras.applications.imagenet_utils import preprocess_input
from IPython.display import SVG
from keras.utils.vis_utils import model_to_dot
from keras.utils import plot_model
from resnets_utils import *
from keras.initializers import glorot_uniform
import scipy.misc
from matplotlib.pyplot import imshow
import os
os.environ['TF_CPP_MIN_LOG_LEVEL'] = '2'
import keras.backend as K
K.set_image_data_format('channels_last')
K.set_learning_phase(1)
X_train_orig, Y_train_orig, X_test_orig, Y_test_orig, classes = load_dataset()
X_train = X_train_orig / 255.
X_test = X_test_orig / 255.
Y_train = convert_to_one_hot(Y_train_orig, 6).T
Y_test = convert_to_one_hot(Y_test_orig, 6).T
# print("number of training examples = " + str(X_train.shape[0]))
# print("number of test examples = " + str(X_test.shape[0]))
# print("X_train shape: " + str(X_train.shape))
# print("Y_train shape: " + str(Y_train.shape))
# print("X_test shape: " + str(X_test.shape))
# print("Y_test shape: " + str(Y_test.shape))
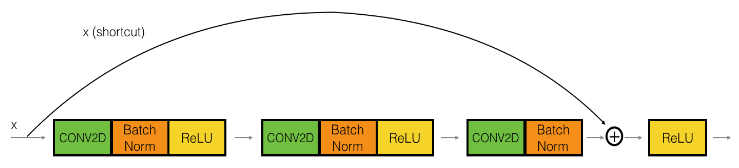
def identity_block(X, f, filters, stage, block):
conv_name_base = 'res' + str(stage) + block + '_branch'
bn_name_base = 'bn' + str(stage) + block + '_branch'
F1, F2, F3 = filters
X_shortcut = X
# First component of main path
X = Conv2D(filters=F1, kernel_size=(1, 1), strides=(1, 1), padding='valid', name=conv_name_base + '2a',
kernel_initializer=glorot_uniform(seed=0))(X)
X = BatchNormalization(axis=3, name=bn_name_base + '2a')(X)
X = Activation('relu')(X)
# Second component of main path (≈3 lines)
X = Conv2D(filters=F2, kernel_size=(f, f), strides=(1, 1), padding='same', name=conv_name_base + '2b',
kernel_initializer=glorot_uniform(seed=0))(X)
X = BatchNormalization(axis=3, name=bn_name_base + '2b')(X)
X = Activation('relu')(X)
# Third component of main path (≈2 lines)
X = Conv2D(filters=F3, kernel_size=(1, 1), strides=(1, 1), padding='valid', name=conv_name_base + '2c',
kernel_initializer=glorot_uniform(seed=0))(X)
X = BatchNormalization(axis=3, name=bn_name_base + '2c')(X)
# Final step: Add shortcut value to main path, and pass it through a RELU activation (≈2 lines)
X = Add()([X, X_shortcut])
X = Activation('relu')(X)
return X
# tf.reset_default_graph()
# with tf.Session() as test:
# np.random.seed(1)
# A_prev = tf.placeholder("float", [3, 4, 4, 6])
# X = np.random.randn(3, 4, 4, 6)
# A = identity_block(A_prev, f = 2, filters = [2, 4, 6], stage = 1, block = 'a')
# test.run(tf.global_variables_initializer())
# out = test.run([A], feed_dict={A_prev: X, K.learning_phase(): 0})
# print("out = " + str(out[0][1][1][0]))
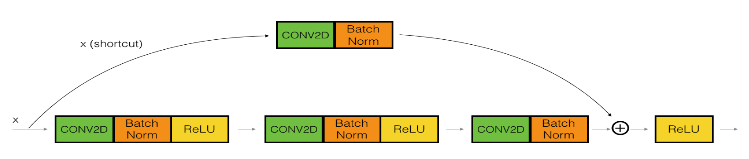
def convolutional_block(X, f, filters, stage, block, s=2):
conv_name_base = 'res' + str(stage) + block + '_branch'
bn_name_base = 'bn' + str(stage) + block + '_branch'
F1, F2, F3 = filters
X_shortcut = X
# First component of main path
X = Conv2D(filters=F1, kernel_size=(1, 1), strides=(s, s), padding='valid', name=conv_name_base + '2a',
kernel_initializer=glorot_uniform(seed=0))(X)
X = BatchNormalization(axis=3, name=bn_name_base + '2a')(X)
X = Activation('relu')(X)
# Second component of main path (≈3 lines)
X = Conv2D(filters=F2, kernel_size=(f, f), strides=(1, 1), padding='same', name=conv_name_base + '2b',
kernel_initializer=glorot_uniform(seed=0))(X)
X = BatchNormalization(axis=3, name=bn_name_base + '2b')(X)
X = Activation('relu')(X)
# Third component of main path (≈2 lines)
X = Conv2D(filters=F3, kernel_size=(1, 1), strides=(1, 1), padding='valid', name=conv_name_base + '2c',
kernel_initializer=glorot_uniform(seed=0))(X)
X = BatchNormalization(axis=3, name=bn_name_base + '2c')(X)
##### SHORTCUT PATH #### (≈2 lines)
X_shortcut = Conv2D(filters=F3, kernel_size=(1, 1), strides=(s, s), padding='valid', name=conv_name_base + '1',
kernel_initializer=glorot_uniform(seed=0))(X_shortcut)
X_shortcut = BatchNormalization(axis=3, name=bn_name_base + '1')(X_shortcut)
# Final step: Add shortcut value to main path, and pass it through a RELU activation (≈2 lines)
X = Add()([X, X_shortcut])
X = Activation('relu')(X)
return X
# tf.reset_default_graph()
# with tf.Session() as test:
# np.random.seed(1)
# A_prev = tf.placeholder("float", [3, 4, 4, 6])
# X = np.random.randn(3, 4, 4, 6)
# A = convolutional_block(A_prev, f=2, filters=[2, 4, 6], stage=1, block='a')
# test.run(tf.global_variables_initializer())
# out = test.run([A], feed_dict={A_prev: X, K.learning_phase(): 0})
# print("out = " + str(out[0][1][1][0]))
def ResNet50(input_shape=(64, 64, 3), classes=6):
# Define the input as a tensor with shape input_shape
X_input = Input(input_shape)
# Zero-Padding
X = ZeroPadding2D((3, 3))(X_input)
# Stage 1
X = Conv2D(64, (7, 7), strides=(2, 2), name='conv1', kernel_initializer=glorot_uniform(seed=0))(X)
X = BatchNormalization(axis=3, name='bn_conv1')(X)
X = Activation('relu')(X)
X = MaxPooling2D((3, 3), strides=(2, 2))(X)
# Stage 2
X = convolutional_block(X, f=3, filters=[64, 64, 256], stage=2, block='a', s=1)
X = identity_block(X, 3, [64, 64, 256], stage=2, block='b')
X = identity_block(X, 3, [64, 64, 256], stage=2, block='c')
### START CODE HERE ###
# Stage 3 (≈4 lines)
X = convolutional_block(X, f=3, filters=[128, 128, 512], stage=3, block='a', s=2)
X = identity_block(X, 3, [128, 128, 512], stage=3, block='b')
X = identity_block(X, 3, [128, 128, 512], stage=3, block='c')
X = identity_block(X, 3, [128, 128, 512], stage=3, block='d')
# Stage 4 (≈6 lines)
X = convolutional_block(X, f=3, filters=[256, 256, 1024], stage=4, block='a', s=2)
X = identity_block(X, 3, [256, 256, 1024], stage=4, block='b')
X = identity_block(X, 3, [256, 256, 1024], stage=4, block='c')
X = identity_block(X, 3, [256, 256, 1024], stage=4, block='d')
X = identity_block(X, 3, [256, 256, 1024], stage=4, block='e')
X = identity_block(X, 3, [256, 256, 1024], stage=4, block='f')
# Stage 5 (≈3 lines)
X = convolutional_block(X, f=3, filters=[512, 512, 2048], stage=5, block='a', s=2)
X = identity_block(X, 3, [512, 512, 2048], stage=5, block='b')
X = identity_block(X, 3, [512, 512, 2048], stage=5, block='c')
# AVGPOOL (≈1 line). Use "X = AveragePooling2D(...)(X)"
X = AveragePooling2D((2, 2), strides=(2, 2))(X)
### END CODE HERE ###
# output layer
X = Flatten()(X)
X = Dense(classes, activation='softmax', name='fc' + str(classes), kernel_initializer=glorot_uniform(seed=0))(X)
# Create model
model = Model(inputs=X_input, outputs=X, name='ResNet50')
return model
model = ResNet50(input_shape=(64, 64, 3), classes=6)
model.compile(optimizer='adam', loss='categorical_crossentropy', metrics=['accuracy'])
model.fit(X_train, Y_train, epochs=2, batch_size=32)
preds = model.evaluate(X_test, Y_test)
print ("Loss = " + str(preds[0]))
print ("Test Accuracy = " + str(preds[1]))
三、总结
ResNet50是一个非常强大的对图像进行分类的模型,我们希望你可以用你所学的知识应用到分类问题上,并达到一定的精度。祝贺你已经实现了一个很好的图像分类系统。
在这次作业中,我们需要注意以下几点:
- 神经网络并不是越深效果越好,因为越深由于梯度消失的缘故,对网络的训练难度也会增大。
- 跳跃连接能够帮助解决梯度消失问题。
- 残差网络主要包括两个block:identity block和convolutional block。