有读者不了解齐次坐标系的,请移驾于此齐次坐标系
本文转载自SLAM入门之视觉里程计(2):相机模型(内参数,外参数)
该文章将四种坐标系的由来,用处描述的非常清楚,博主受用匪浅,但是好像直接转载出了点问题,明明选中了div粘贴到CSDN后只能显示一部分,所以直接贴出链接。
下面,说说博主看了文章之后的感想,并梳理一下脉络。
(注:所有图片也来自于上述链接)
首先,相机模型的重中之重是描述像素坐标,图像坐标,相机坐标,世界坐标之间的变换关系。
由小孔成像模型引入,这里有图像坐标系和相机坐标系。其中,相机坐标系以相机中心为原点(三维坐标,其中点的描述为PC=(X,Y,Z)),图像坐标系以成像平面中心O’为原点(二维坐标,其中点的描述为p=(x,y))。
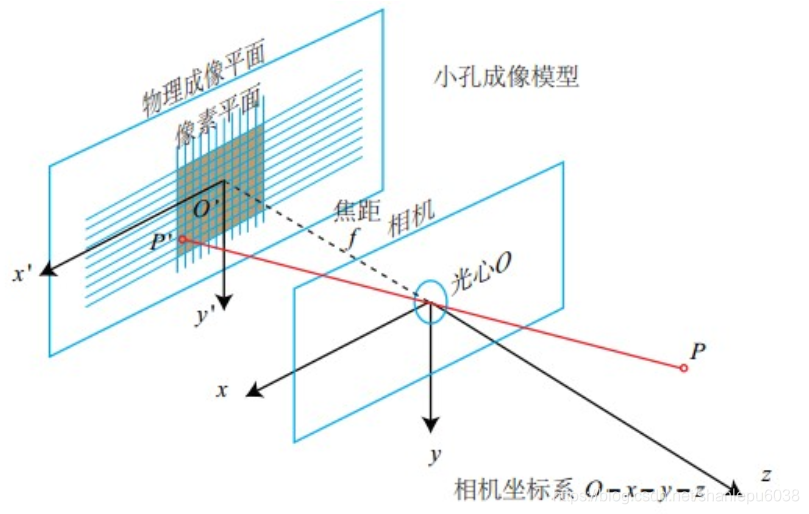
由于描述图像的习惯或者说是行规吧,都是以图像的左上角为原点,x轴水平向右延伸,y轴垂直向下延伸,所以要将图像坐标转换到像素坐标,这就出现了像素坐标系。这个转换中牵涉到平移和缩放。
看起来上述已经完美了,但是,有一个严重的问题:相机坐标系并不是一个“稳定”的坐标系,其会随着相机的移动而改变坐标的原点和各个坐标轴的方向,用该坐标系下坐标进行计算,显然不是一个明智的选择。需要引进一个稳定不变坐标系:世界坐标系,该坐标系是绝对不变,SLAM中的视觉里程计就是求解相机在世界坐标系下的运动轨迹。
设PC是P在相机坐标系坐标,PW是其在世界坐标系下的坐标,可以使用一个旋转矩阵R和一个平移向量t,将PC变换为PW
PC=RPW+t
至此,四个坐标系的由来及用处已经描述完了,具体推导详见上面引用的博客。
下面直接贴出结论公式:
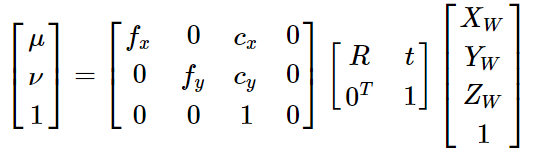
其中,fx = af ; fy = bf
f是焦距,a,b分别是图像坐标转像素坐标时在水平轴x和竖直轴y的缩放倍数。
R,t是相机坐标转世界坐标是的旋转矩阵和平移向量