激光雷达坐标系、相机坐标系与到图像坐标系之间的转换
本文解决的问题是经联合标定后,点云和图像之间坐标相互转换的问题。需要的先验知识和条件:相机标定;激光雷达和相机联合标定;相机内参、相机和雷达外参。
把雷达坐标系看成世界坐标系,则世界坐标系中任意一点W,其世界坐标为:
其世界齐次坐标为:
又假设雷达坐标系到相机坐标系的转换矩阵为E,(该矩阵即是外参矩阵,取其英文Extrinsic首字母E),假设其逆矩阵为:
设点W在相机坐标系下的坐标表示为:
其在相机坐标系下的齐次坐标为:
则有:
即:

为消除齐次坐标、简化计算,特令:

则公式变为:

设相机坐标系到图像坐标系的转换矩阵K(K矩阵即是相机内参矩阵)及其逆矩阵K^(-1)为:

设点W在图像坐标系下的坐标为:
其在图像坐标系下的齐次坐标为:
则有:
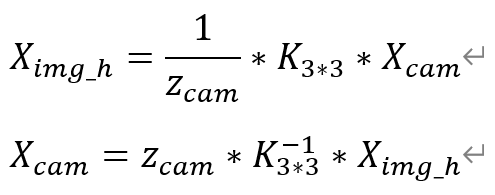
即有:

带入上式即可得相机坐标Ximg_h和雷达坐标的互相转换公式:
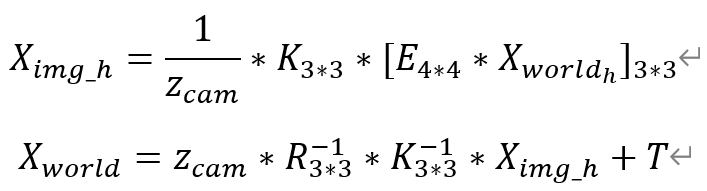
其中, 代表对矩阵M取前三行前三列。
代表对矩阵M取前三行前三列。
由上式可知:已知世界(雷达)坐标,可以将其精确地投影到图像坐标上。但要使相机坐标能准确转换到雷达坐标,必须知道Zcam,这是点离相机平面的距离,由于仅从图像中无法得知Zcam,所以仅用图像无法把图像上的点投影到世界(雷达)坐标系。