1.colmap坐标系:
- a. 左上角坐标是(0.5,0.5)为了双线性插值
- b. 坐标系方向xyz分别是红绿蓝、右下前
- c. colmap的pose是word2camera的,与slam常用的传感器sensor2world不同,所以有时需要转换:
– 点P,camera为Pc,则:Pc = RP+t
– 而对于camera2world: P = RPc + C, C = -(R转置)t - d. world坐标系的原点是在第一帧,但未必是(0,0,0),由于BA的优化有偏差
-e. 相对坐标是后一帧相对前一帧的坐标,绝对坐标是相对于第一帧的 - f. 关于GPS的坐标系,WGS84(GPS标准格式,地心坐标系,BLH纬度经度大地高),UTM坐标系(6度分带,zone = int(lon/6)+31),WGS84转UTM:
–利用epsg
–利用proj4
–参考OpenMVG
该部分参考官方文档和网课
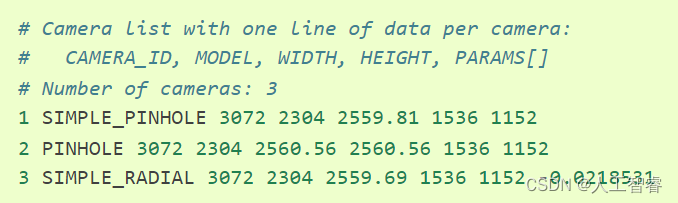
2.相机模型
直接看源码,推荐选择方案,一般来说,去除径向畸变的针孔相机模型就足够了。
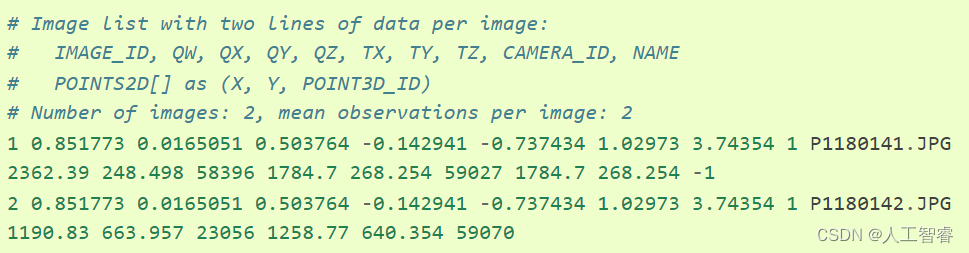
3.整体框架,参考官方文档:
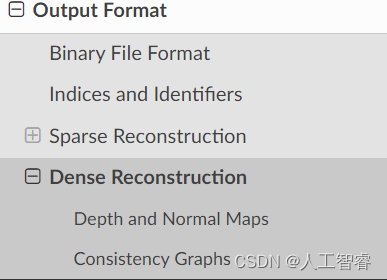
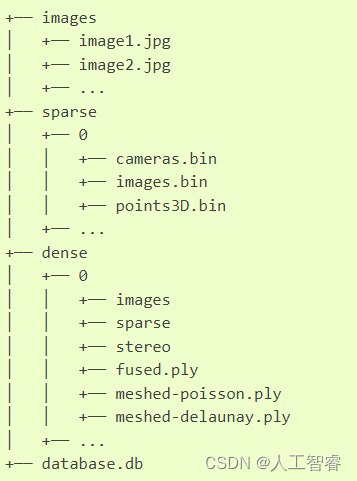
其中,SparseReconstruction包含 三个输出文件,我们以此按自己需求进行格式转换(如接入openMVS,ps这个接口已经有了)。cameras.txt, images.txt, and points3D.txt: