目录
1. 相机标定的四个坐标系
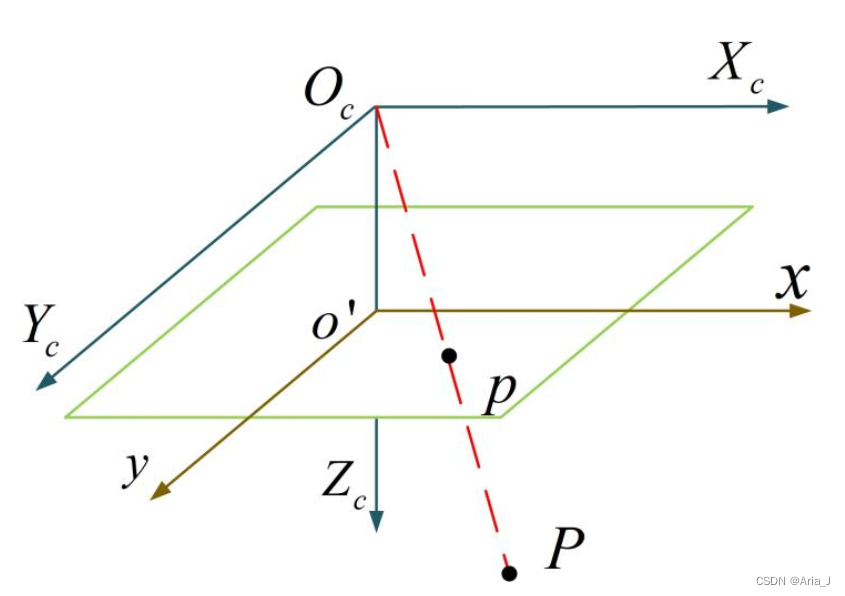
如图1.所示,为了能够更好的描述和计算相机标定过程中图像上的像素点与空间三维点之间的关系,首先定义了四个坐标系:世界坐标系、相机坐标系
、图像平面坐标系
、像素坐标系
。

1.1 世界坐标系
设置世界坐标系是为了统一描述真实三维世界中物体的位置,包括相机的位置、特征目标的位置等。在实际应用中世界坐标系是以空间中任意一点作为原点建立的笛卡尔直角三维坐标系。
1.2 相机坐标系
相机坐标系同样是笛卡尔直角坐标系。相机坐标系是空间三维信息与二维图像信息之间的关键媒介,如图1所示,原点
建立在相机的光心,
轴为相机光轴,方向向外。
平面垂直于想相机光轴,
轴平行于图像平面的横向。
1.3 图像平面坐标系
图像平面坐标系用于描述特征点在图像平面上的位置坐标,坐标单位一般为毫米。如图1所示,图像平面坐标系是在图像平面上建立二维坐标系,坐标原点为相机坐标中
轴与图像平面的交点,
轴、
轴分别平行于相机坐标系的
轴、
轴。图像平面坐标系的原点
与相机坐标系的原点
之间的距离为相机的焦距
。
1.4 像素坐标系
相机采集的图像一般为二维数字图像,以像素矩阵的形式存储,每个元素为该像素的图像灰度值。图像平面坐标系用于描述图像点在图像平面的位置坐标,像素坐标系描述该点在像素矩阵中的位置。如图1所示,像素坐标系建立在图像平面上,坐标原点建立在图像平面的左上角,
轴平行于图形平面坐标系的
轴,
轴平行于图形平面坐标系的
轴。因此,坐标
分别表示像素点在像素矩阵中的行和列。
2. 坐标系之间的转换关系
从空间三维点的世界坐标系
到其对应的在图像平面的投影点
的像素坐标
之间的变换可以分为三个变换,如图2所示。

2.1 世界坐标系与相机坐标系的变换
同为三维坐标系的世界坐标系与相机坐标系之间的变换可以使用旋转矩阵和平移矩阵进行描述。假设空间三维点的相机坐标为
,则该点的世界坐标与相机坐标之间的关系可以表示为:
其中,是旋转矩阵,
的矩阵;
是平移矩阵,
的矩阵。
2.2 相机坐标系与图像平面坐标系的变换
由于相机坐标系的轴和
轴分别与图像平面坐标系的
轴和
轴平行,因此点
的相机坐标
与其对应的图像投影点
的图像平面坐标
之间只存在一个比例关系,此比例关系与相机焦距
和
点的
坐标有关。
点的相机坐标与其对应的投影点
的图像平面坐标之间的关系为:
其中,是比例因子,不为0。
2.3 图像平面坐标系与像素坐标系的变换
图像平面坐标系的原点是光轴在图像平面上的投影点,假设该点在像素坐标系中的坐标为。三维点
对应的投影点
的图像平面坐标与其像素坐标之间的关系为:
其中,是像素在图像平面坐标系的
轴方向上的物理尺寸,
是像素在图像平面坐标系的
轴方向上的物理尺寸。