---恢复内容开始---
1、针孔成像模型
如下图,对于世界坐标系的一点P,我们需要求出其在像素坐标系的位置。
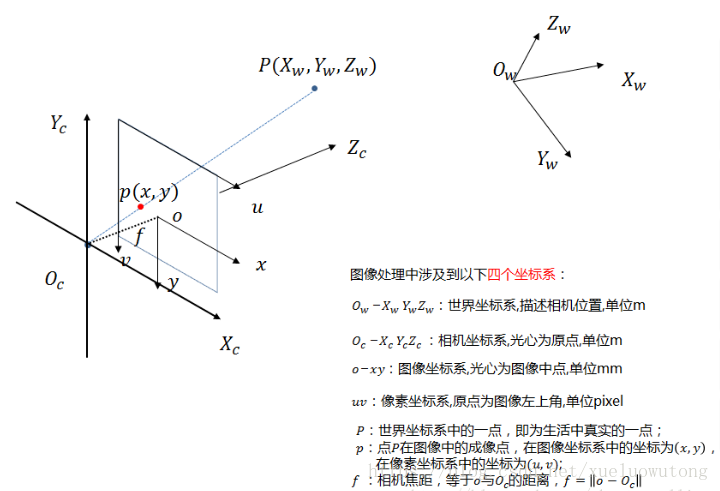
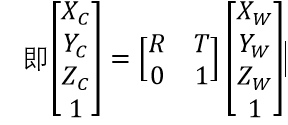
(1)世界坐标系->相机坐标系
令R,T表示世界坐标系转换到相机坐标系的旋转矩阵和平移矢量,则P在相机坐标系的坐标为

(2)相机坐标系->图像坐标系
由上图的相似三角形可以得到:

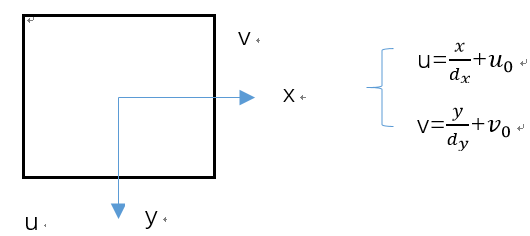
(3)图像坐标系->像素坐标系
如下图,(u,v)是P的像素坐标,其中dx dy分别是水平、竖直方向上一个像素的长度(mm)。u0 v0是图像中心的像素坐标。
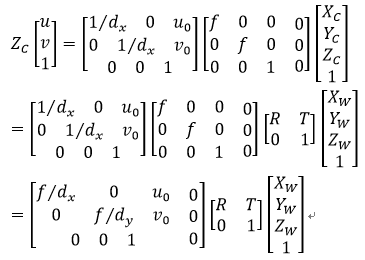
(4)总结
总结以上描述:

---恢复内容结束---