标题:PointGrid: A Deep Network for 3D Shape Understanding
作者: Truc Le and Ye Duan
又是一篇2018CVPR的文章。。。
今天介绍的文章是“PointGrid: A Deep Network for 3D Shape Understanding”----点云网格:一个对于3D形状理解的深度网络。
体素网格因为它的规律性,在3D深度学习中被广泛应用。然而,使用相对较低阶的局部近似函数(例如分段常数函数)或者分段线性函数(距离场)来近似3D形状,意味着需要一个非常高分辨率的网格来表示更加精细的几何形状细节,这样会导致内存占用高,计算量大的问题。在文中,作者提出了PointGrid,一个3D卷积网络,在每个网络单元中包含恒定数量的点,从而允许网络学习更高阶的局部逼近函数,可以更好地表示局部几何形状细节。通过对流行的形状识别的基准进行测试,在现有的深度学习中,PointGrid展示了良好的性能。
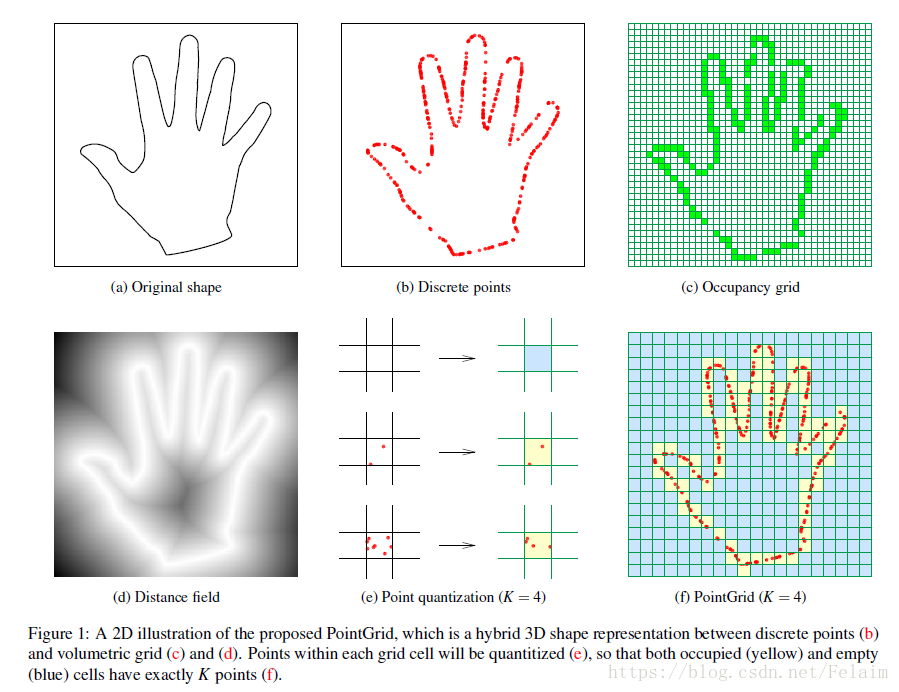
在这项工作中,作者提出PointGrid,这是一个三维卷积网络, 它是点和网格的集成,是一种可以更好地表示局部几何形状细节的混合模型,如下图所示。
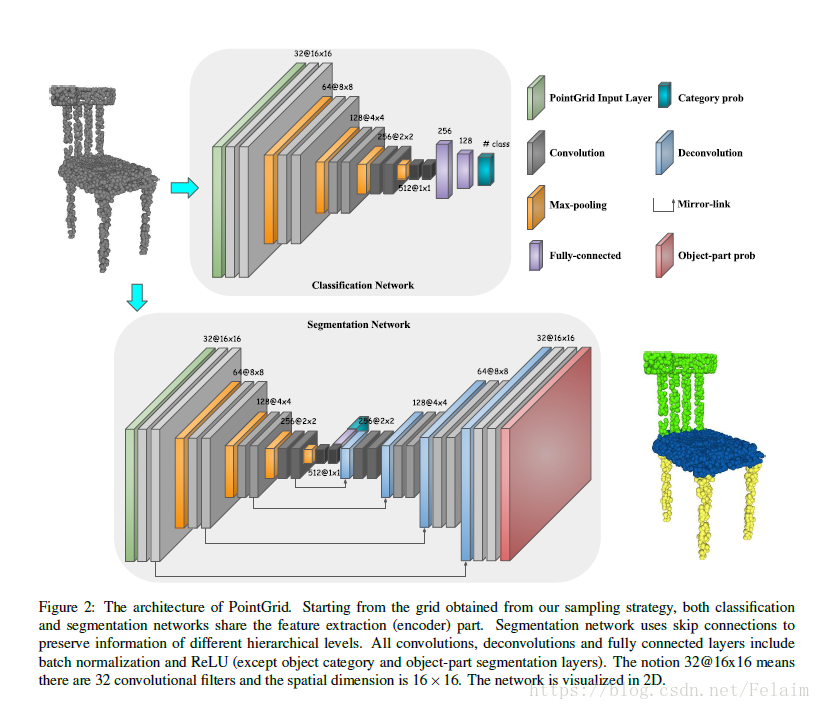
本文所提出的方法比体素网格更好地表达尺度变化,并且避免信息丢失。 PointGrid具有嵌入体素网格,其具有规则结构,允许3D卷积分层次地提取全局信息。在每个网格单元中,文中采样恒定数量的点(例如K)以克服网格大小限制。作者期望网格单元内的采样点可以更好地表示局部几何形状细节,而网格在数据大小方面很好地缩放,因为它仅在K中线性缩放,而不是像纯体素网格那样成立方倍的缩放(在传统的体素网络中时间复杂度和空间复杂度都是成立方关系)。本文还展示了PointGrid不需要高分辨率网格来表现良好,并且16×16×16的网格在实验上足够,这远小于VoxNet的典型64×64×64网格。因此,PointGrid(如下图所示)在训练和测试中都更简单,更快捷。通过实验,PointGrid与最先进的方法相比,包括Point-Net ,PointNet ++,Kd-Net ,O-CNN 和Oct-Net ,更小内存占用。
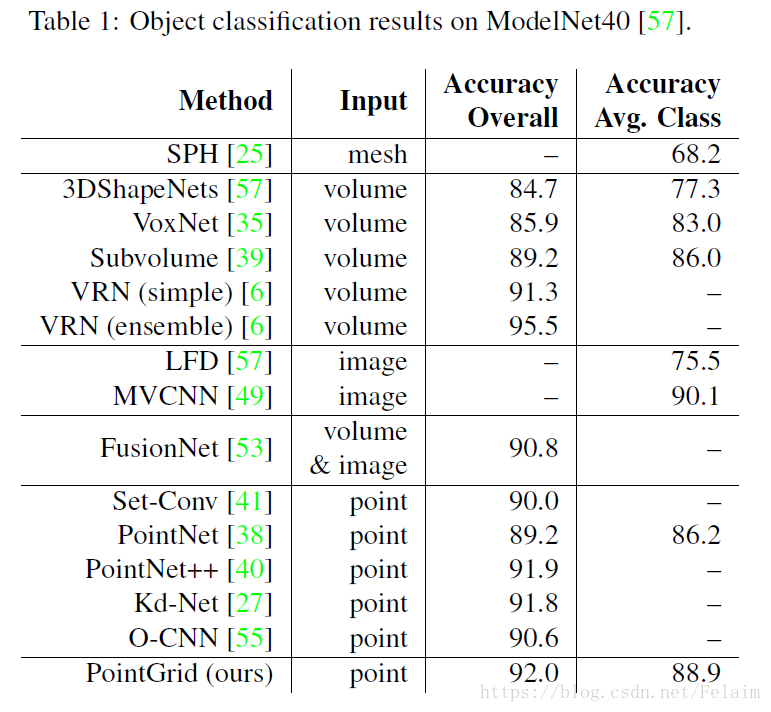
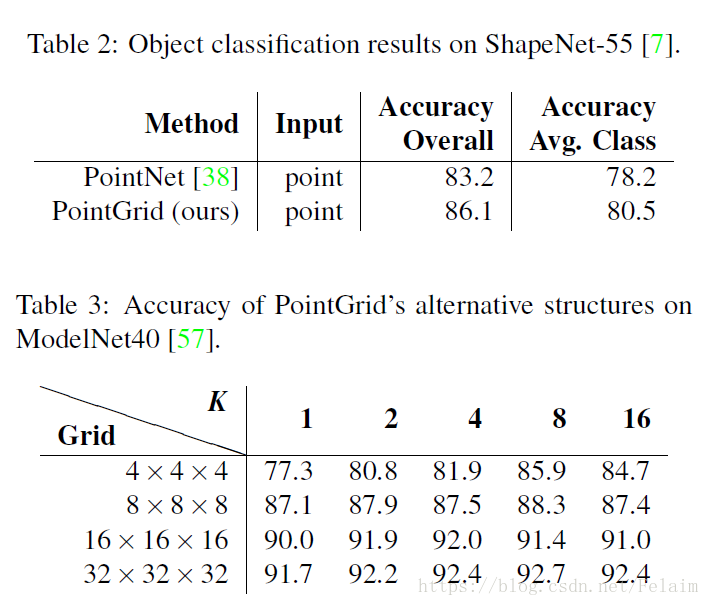
下面几个表格是对应的实验结果,可以看到在ModelNet40,ShapeNet对应的数据集上还是获得了不错的效果的。