文章下载链接:文章下载链接
代码下载链接:Staple代码
————————————————————————————————————————————
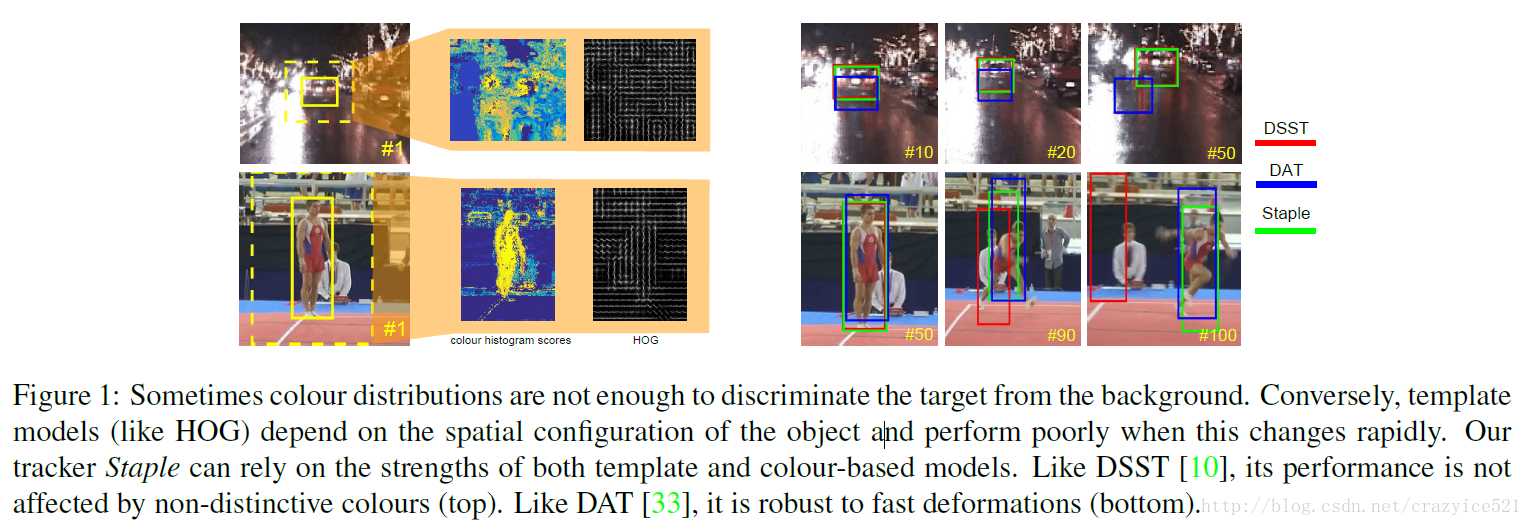
今天要讲的这篇文章也是基于相关滤波器(不懂相关滤波器的请看我前一篇文章)进行改进的一篇文章,发表在2016年CVPR上面,提出了一个新的想法,融合算法,使用HOG-KCF+color-KCF结合算法对目标进行跟踪,HOG特征对形变和运动模糊比较敏感,但是对颜色变化能够达到很好的跟踪效果,color特征对颜色比较敏感,但是对形变和运动模糊能够有很好的跟踪效果,同时使用两者融合能够解决大部分跟踪过程当中遇到的问题。作者在文章的开头就放出来这张图,图中很明显的可以看出,当颜色对目标影响过大时候(图中第二行),DSST对目标跟踪效果较好,当运动模糊对目标影响过大(图中第一行)DAT对目标跟踪效果较好。
Abstract
近些年来,基于相关滤波跟踪器的算法得到了很大的改进,已经能够达到很好的跟踪效果,14年的KCF,15年的SRDCF、HCF等算法,都已经达到了很高的精度,像HCF已经在OTB-50上达到了0.89的效果,但是美中不足的就是使用了深度学习特征之后速度相对来说比较慢一点,不能达到实时的要求。本文作者经过研究发现,以前算法的模型的学习还是很依赖于跟踪目标的空间信息,对变形的目标跟踪效果不是很好,但是使用颜色特征对目标进行学习能够很好的处理跟踪目标发生形变和运动模糊的问题,但是当光照条件变化的时候,颜色特征就表现的相对无力,这个时候使用HOG特征能够对光照变化的跟踪目标进行很好的跟踪。所以,作者就想到,使用一个融合互补因子在同一个回归框架当中能够很好的对这些因素进行很好的处理同时能够达到比较快的速度,80FPS,并且在跟踪效果上面也比大部分现有的跟踪算法效果要好。
本文算法思想

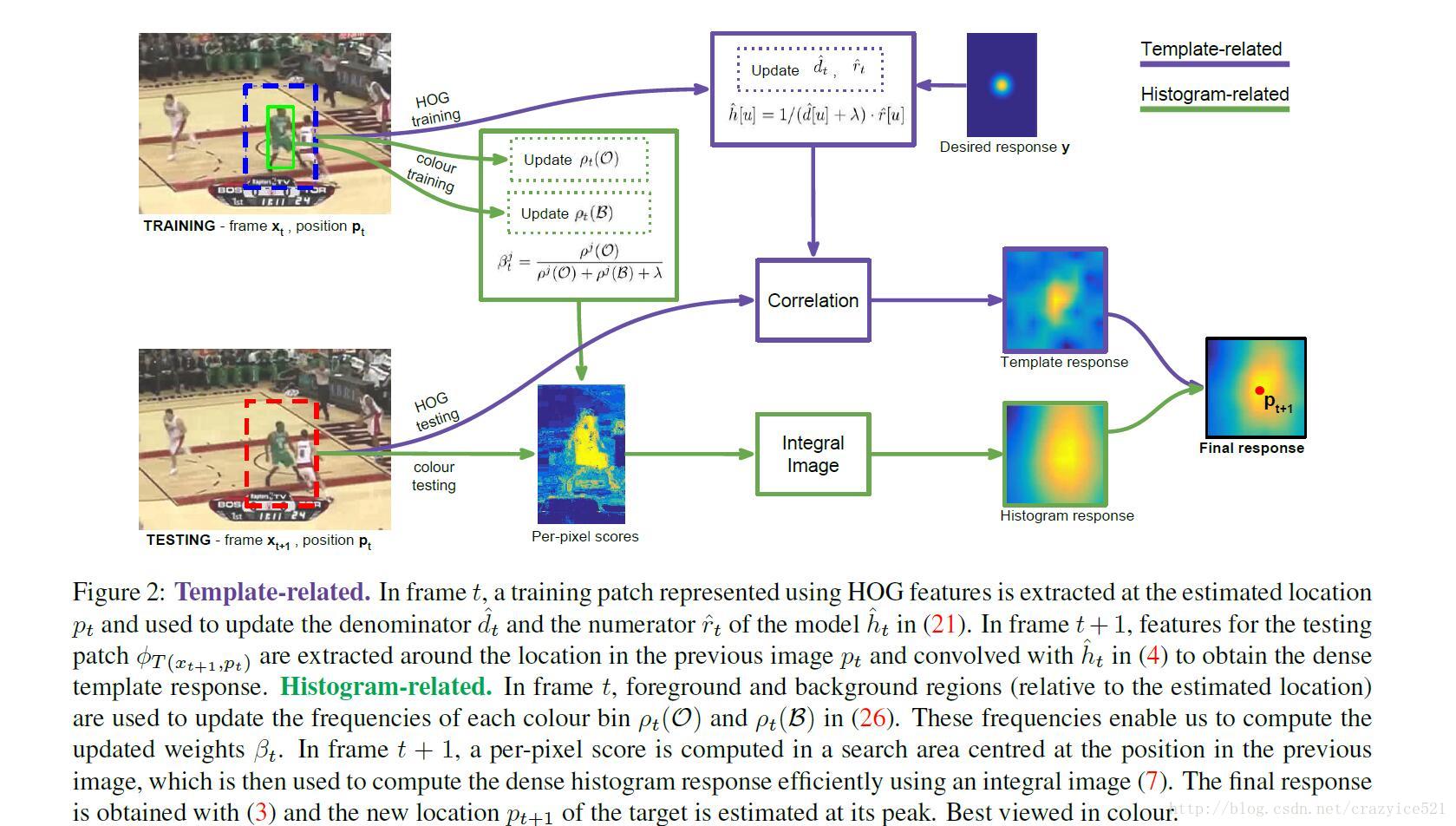
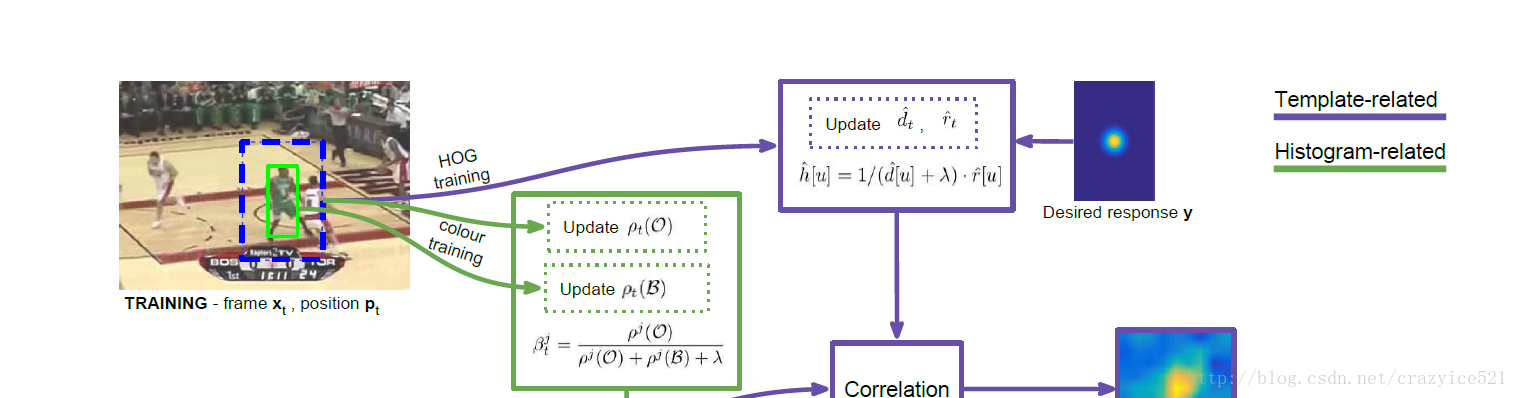
这里说一下这个文章的框架思想,有助于看文章的小伙伴理解,首先先看上面一部分,就是这部分我截图出来的区域,
先看紫色的线,先自动忽略绿色的线,上面这部分就是训练部分,当我们输入一张图片的时候,使用HOG特征对目标图片进行特征提取供我们的滤波器进行使用,学习。得到特征之后,根据相关滤波器的学习规则学习得到滤波模版,使用给定公式更新模版,蓝色的线学习结束;
接下来看绿色的线,绿色的线就是使用颜色特征对滤波模板进行学习,然后使用给定的更新公式对学习到的模板进行更新,绿色线学习完毕。
接下来就看下半部分,下半部分就是跟踪过程,上面学习了滤波器,怎么使用呢?就是下面这半部分了,首先基于上一帧学习到的位置pt处,使用给定大小的目标框标出大致目标位置所在,然后使用学习得到的两个滤波器模板对目标分别学习,就是图中紫色的线和绿色的线,紫色的线就是使用HOG模板学习的跟踪器对目标跟踪的结果,绿色的就是使用Color特征对目标图片学习的结果。然后得到对应的response map,使用给定的规则

本文创新点
正如我前面所说的一样,作者在探究到这些因素之后,对整个影响因素和对跟踪器改变造成的变化之后决定使用融合因子的算法对目标进行跟踪。使用HOG特征和COLOR特征两种互补的特征因子对目标进行学习,融合跟踪结果,能够互补解决对方不能解决的问题,从而提升跟踪效果,同时不会对跟踪速度有较大的影响。
实验效果展示
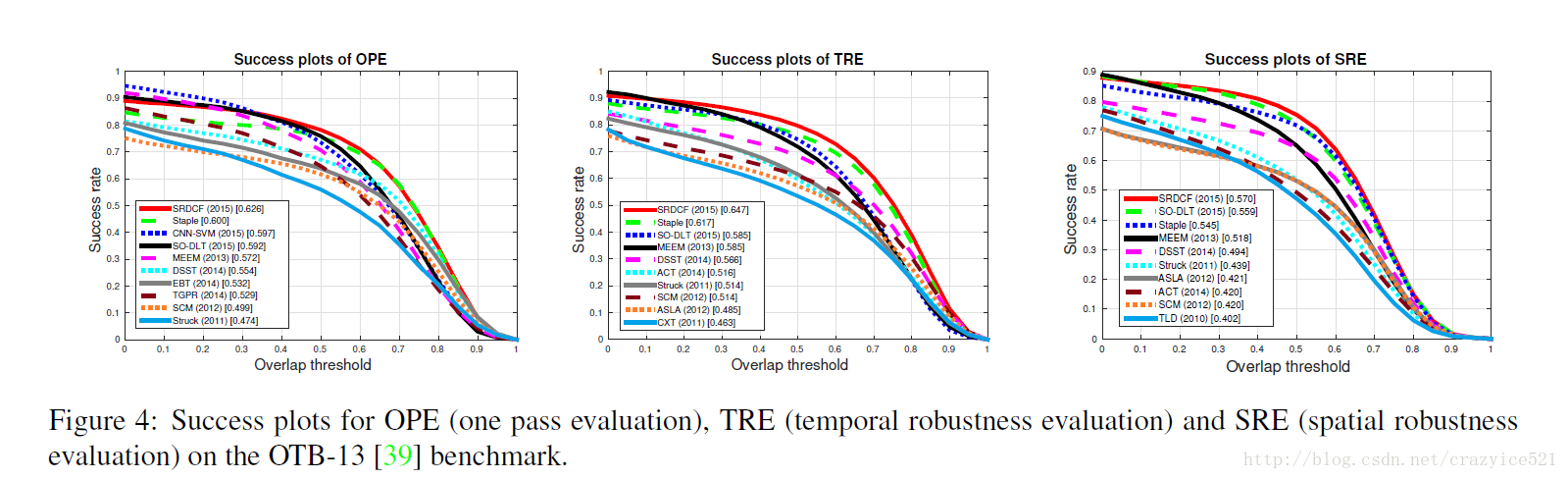
在标准序列集OTB-50上面的跟踪效果,效果还是很明显的提升
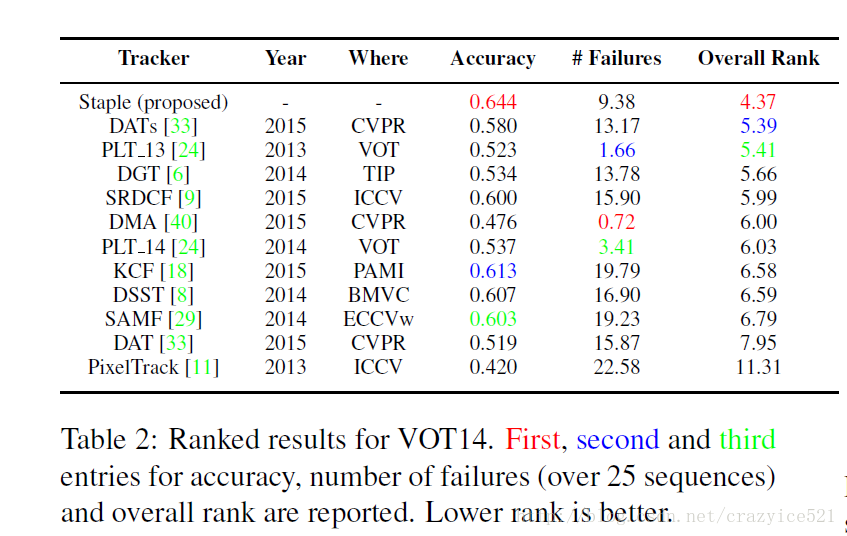
同时和在VOT2014上面表现比较好的几个跟踪算法做了一些比较。在精度上效果是最好的,在失败数上面排名第二和整体排名上面第三。