版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/seamanj/article/details/89735282
这篇文章其实就是几篇文章凑在了一起.
fusion的部分用的是
ElasticFusion: Dense SLAM without a pose graph
这篇文章实现了local loop closure and global loop closure
然后他的segmentation有两种, 一种是MOTION SEGMENTATION, 它是基于超像素来做这种segmentation. 对于超像素,它用这篇文章来划分
gSLICr: SLIC superpixels at over 250Hz
划分好超像素后就用这篇文章来做segmentation
Efficient Inference in Fully Connected CRFs with Gaussian Edge Potentials
这篇文章主要需要提供unary potential and pairwise potential, 所以在co-fusion文章的VI部分有具体的提及
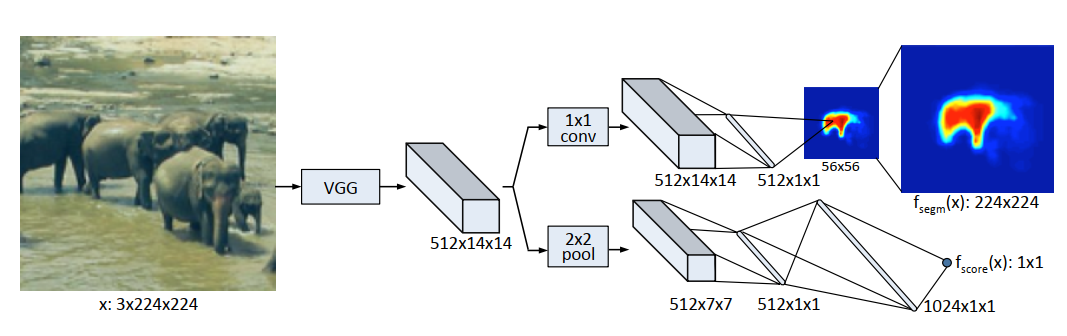
然后就是另一种segmentation, OBJECT INSTANCE SEGMENTATION, 这个是用deep learning来做的, 主要有两篇文章, 一篇是Learning to Segment Object Candidates
另一篇是Learning to Refine Object Segments
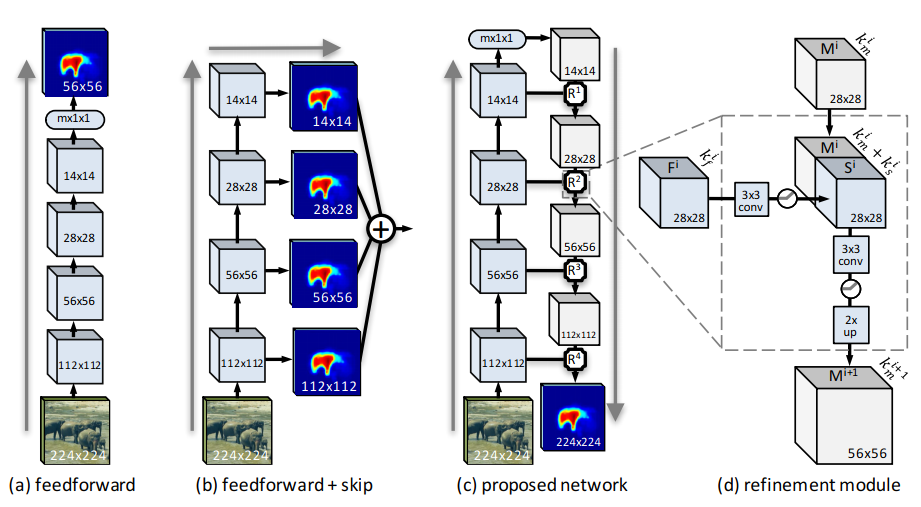
是它的提高版
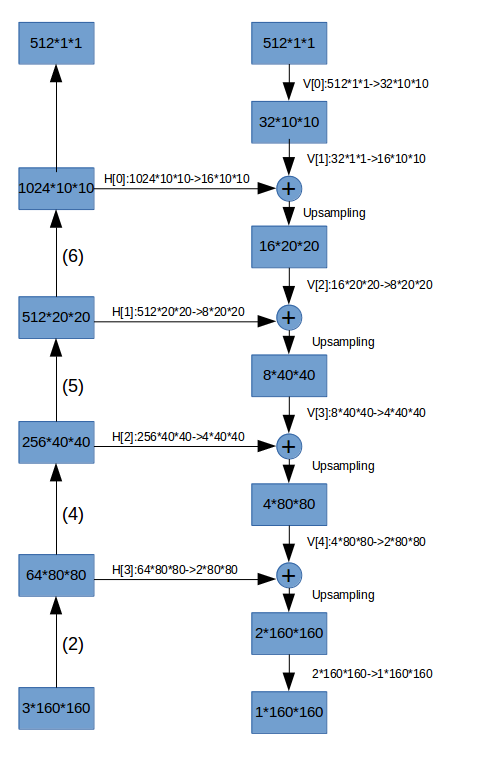
具体的代码用图表示为