毕设之Opencv批量霍夫圆检测
程序思路:编写read_csv()函数读取图片目录下txt文档,获取各BMP文件绝对路径以及对应圆的圆心坐标、半径参数。读取各BMP图像,转为灰度图,进行图像平滑,最后霍夫圆检测;并将检测结果和实际结果存入txt文档。
本程序高斯平滑和霍夫圆变换都需要调参。
功能小结:
1、read_csv()函数
void read_csv(string&csvPath, vector<String>&CirclePath, vector<int>&Circle_x, vector<int>&Circle_y, vector<int>&Circle_r)csvPath:txt路径
CirclePath:从txt中读取的bmp路径
Circle_x:bmp图像中圆的圆心x坐标
Circle_y:bmp图像中圆的圆心y坐标
Circle_r:bmp图像中圆的半径r
2、创建txt文本,并写入数据
#include <iostream>
#include <sstream>
#include <fstream>
ofstream file("filepath",ios::out);
if (file.is_open())
{
file <<;
}
file.close();3、转化为灰度图
cvtColor(srcImage,midImage, COLOR_BGR2GRAY);//转化边缘检测后的图为灰度图
@paramsrc input image: 8-bit unsigned, 16-bit unsigned ( CV_16UC... ), orsingle-precision
floating-point.
@paramdst output image of the same size and depth as src.
@paramcode color space conversion code (see cv::ColorConversionCodes).
@paramdstCn number of channels in the destination image; if the parameter is 0, thenumber of the
channelsis derived automatically from src and code.
3、高斯平滑
GaussianBlur(midImage,midImage, Size(9, 9), 2, 2);
感悟:ksize、 sigmaX、sigmaY取值大小会影响平滑效果,对霍夫圆检测有较大的影响。
CV_EXPORTS_W void GaussianBlur( InputArray src,OutputArray dst, Size ksize,
double sigmaX,double sigmaY = 0,
int borderType =BORDER_DEFAULT );
/**@brief Blurs an image using a Gaussian filter.
Thefunction convolves the source image with the specified Gaussian kernel.In-place filtering is
supported.
@paramsrc input image; the image can have any number of channels, which are processed
independently,but the depth should be CV_8U, CV_16U, CV_16S, CV_32F or CV_64F.
@paramdst output image of the same size and type as src.
@paramksize Gaussian kernel size. ksize.width and ksize.height can differ but theyboth must be
positiveand odd. Or, they can be zero's and then they are computed from sigma.
@paramsigmaX Gaussian kernel standard deviation in X direction.
@paramsigmaY Gaussian kernel standard deviation in Y direction; if sigmaY is zero, itis set to be
equalto sigmaX, if both sigmas are zeros, they are computed from ksize.width andksize.height,
respectively(see cv::getGaussianKernel for details); to fully control the result regardlessof
possiblefuture modifications of all this semantics, it is recommended to specify all ofksize,
sigmaX,and sigmaY.
@paramborderType pixel extrapolation method, see cv::BorderTypes
@sa sepFilter2D, filter2D, blur, boxFilter,bilateralFilter, medianBlur
*/
4、霍夫圆变化
HoughCircles(midImage,circles, HOUGH_GRADIENT,1.5, 10, 100, 300, 100, 500);
感悟:dp取值1.5合适(圆心相关);param1表示传递给canny边缘检测的高阈值,低阈值取其一半; param2越大圆越完美数量越少;
CV_EXPORTS_W void HoughCircles( InputArray image,OutputArray circles,
int method,double dp, double minDist,
double param1 = 100,double param2 = 100,
int minRadius = 0,int maxRadius = 0 );
/**@example houghcircles.cpp
Anexample using the Hough circle detector
*/
/**@brief Finds circles in a grayscale image using the Hough transform.
Thefunction finds circles in a grayscale image using a modification of the Houghtransform.
Example::
@code
#include <opencv2/imgproc.hpp>
#include <opencv2/highgui.hpp>
#include <math.h>
using namespace cv;
using namespace std;
int main(int argc, char** argv)
{
Mat img, gray;
if( argc != 2 || !(img=imread(argv[1],1)).data)
return -1;
cvtColor(img, gray, COLOR_BGR2GRAY);
// smooth it, otherwise a lot of falsecircles may be detected
GaussianBlur( gray, gray, Size(9, 9),2, 2 );
vector<Vec3f> circles;
HoughCircles(gray, circles,HOUGH_GRADIENT,
2, gray.rows/4, 200, 100 );
for( size_t i = 0; i <circles.size(); i++ )
{
Pointcenter(cvRound(circles[i][0]), cvRound(circles[i][1]));
int radius =cvRound(circles[i][2]);
// draw the circle center
circle( img, center, 3,Scalar(0,255,0), -1, 8, 0 );
// draw the circle outline
circle( img, center, radius,Scalar(0,0,255), 3, 8, 0 );
}
namedWindow( "circles", 1 );
imshow( "circles", img );
waitKey(0);
return 0;
}
@endcode
@noteUsually the function detects the centers of circles well. However, it may failto find correct
radii.You can assist to the function by specifying the radius range ( minRadius andmaxRadius ) if
youknow it. Or, you may ignore the returned radius, use only the center, and findthe correct
radiususing an additional procedure.
@paramimage 8-bit, single-channel, grayscale input image.
@paramcircles Output vector of found circles. Each vector is encoded as a 3-element
floating-pointvector \f$(x, y, radius)\f$ .
@parammethod Detection method, see cv::HoughModes. Currently, the only implementedmethod is HOUGH_GRADIENT
@paramdp Inverse ratio of the accumulator resolution to the image resolution. Forexample, if
dp=1, the accumulator has the same resolution as the input image. If dp=2 , theaccumulator has
halfas big width and height.
@paramminDist Minimum distance between the centers of the detected circles. If theparameter is
toosmall, multiple neighbor circles may be falsely detected in addition to a trueone. If it is
toolarge, some circles may be missed.
@paramparam1 First method-specific parameter. In case of CV_HOUGH_GRADIENT , it isthe higher
thresholdof the two passed to the Canny edge detector (the lower one is twice smaller).
@paramparam2 Second method-specific parameter. In case of CV_HOUGH_GRADIENT , it isthe
accumulatorthreshold for the circle centers at the detection stage. The smaller it is, themore
falsecircles may be detected. Circles, corresponding to the larger accumulatorvalues, will be
returnedfirst.
@paramminRadius Minimum circle radius.
@parammaxRadius Maximum circle radius.
@safitEllipse, minEnclosingCircle
*/
源码:
//--------------------------------------【程序说明】-------------------------------------------
// 程序描述: 利用霍夫变换检测圆
// 开发测试所用操作系统: Windows 7 64bit
// 开发测试所用IDE版本:VisualStudio 2015
// 开发测试所用OpenCV版本: 3.1
// 2015年5月 Created by @姬波林
// 2015年5月 Revised by @姬波林
//------------------------------------------------------------------------------------------------
//---------------------------------【头文件、命名空间包含部分】----------------------------
// 描述:包含程序所使用的头文件和命名空间
//------------------------------------------------------------------------------------------------
#include <opencv2/opencv.hpp>
#include <opencv2/imgproc/imgproc.hpp>
using namespace cv;
using namespace std;
#include <iostream>
#include <sstream>
#include <fstream>
//-----------------------------------【宏定义部分】--------------------------------------------
// 描述:定义一些辅助宏
//------------------------------------------------------------------------------------------------
//--------------------------------【全局函数声明部分】-------------------------------------
// 描述:全局函数声明
//-----------------------------------------------------------------------------------------------
void read_csv(string&csvPath, vector<String>&CirclePath, vector<int>&Circle_x, vector<int>&Circle_y, vector<int>&Circle_r)
{
string line, path, classLabel1, classLabel2, classLabel3;
ifstream file(csvPath.c_str(),ifstream::in);
while (getline(file, line))
{
stringstream lines(line);
getline(lines, path, '(');
getline(lines, classLabel1,',');
if (!classLabel1.empty())
{
Circle_x.push_back(atoi(classLabel1.c_str()));
}
getline(lines, classLabel2, ')');
if (!classLabel2.empty())
{
Circle_y.push_back(atoi(classLabel2.c_str()));
}
getline(lines, classLabel3, '.');
if (!classLabel3.empty())
{
Circle_r.push_back(atoi(classLabel3.c_str()));
}
if (!path.empty())
{
CirclePath.push_back(path+"("+ classLabel1+","+ classLabel2+")" + classLabel3+".bmp");
}
}
}
//-----------------------------------【ShowpText( )函数】----------------------------------
// 描述:输出一些帮助信息
//----------------------------------------------------------------------------------------------
void ShowText()
{
//输出程序说明
printf("绘制100个半径随机、圆心随机的圆,并保存为500X500BMP文件\n");
printf("存储位置:D:\\圆\n");
printf("命名规则:序号+圆心坐标+半径\n");
printf("当前使用的OpenCV版本为:"CV_VERSION );
printf("\n\n ----------------------------------------------------------------------------\n");
}
//---------------------------------------【main( )函数】--------------------------------------
// 描述:控制台应用程序的入口函数,我们的程序从这里开始执行
//-----------------------------------------------------------------------------------------------
const int kvalue = 15;//双边滤波邻域大小
int main()
{
//批量读入圆路径
string CircleCsvPath ="D:\\Circle\\at.txt";
vector<String> vecCirclePath;
vector<int> Circle_x, Circle_y, Circle_r;
read_csv(CircleCsvPath, vecCirclePath,Circle_x, Circle_y, Circle_r);
ofstream file("D:\\Circle\\检测结果.txt",ios::out);
if (file.is_open())
{
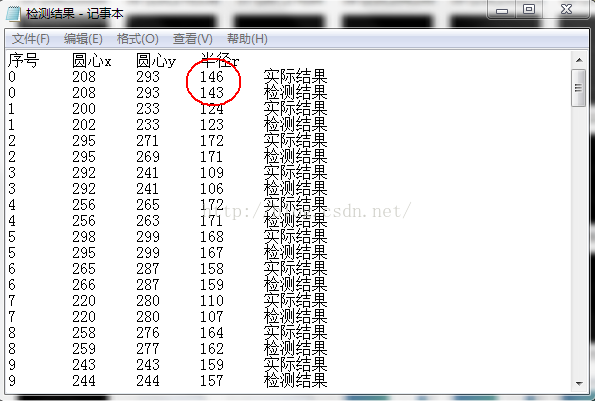
file << "序号" <<"\t" <<"圆心x"<< "\t"<< "圆心y"<< "\t"<< "半径r"<< endl;
}
//霍夫圆检测
for (size_t i = 0; i < 100; i++)
{
Mat srcImage = imread(vecCirclePath[i].c_str(), 1);//读取原彩色图
//【1】载入原始图、Mat变量定义
Mat midImage, dstImage;//临时变量和目标图的定义
//【2】显示原始图
//imshow("【原始图】", srcImage);
//【3】转为灰度图并进行图像平滑
cvtColor(srcImage, midImage, COLOR_BGR2GRAY);//转化边缘检测后的图为灰度图
GaussianBlur(midImage, midImage, Size(9, 9), 2, 2);
//imshow("图像平滑", midImage);
//【4】进行霍夫圆变换
vector<Vec3f> circles;
HoughCircles(midImage, circles, HOUGH_GRADIENT, 1.5, 10, 100, 300,100, 500);
cout << "x=\ty=\tr=" << endl;
//【5】依次在图中绘制出圆
for (size_t j = 0; j < circles.size(); j++)
{
//参数定义
Point center(cvRound(circles[j][0]), cvRound(circles[j][1]));
int radius = cvRound(circles[j][2]);
//绘制圆心
circle(srcImage, center, 1, Scalar(0, 255, 0), -1, 8,0);
//绘制圆轮廓
circle(srcImage, center, radius, Scalar(155, 50, 255), 1,8, 0);
if (file.is_open())
{
file << i << "\t" << Circle_x[i]<< "\t"<< Circle_y[i]<< "\t"
<< Circle_r[i]<< "\t"<< "实际结果"<< endl;
file<< i << "\t" << cvRound(circles[j][0])<< "\t"<< cvRound(circles[j][1])<< "\t"
<< cvRound(circles[j][2])<< "\t"<< "检测结果"<< endl;//在控制台输出圆心坐标和半径
}
cout << Circle_x[i]<< "\t"<< Circle_y[i]<< "\t"
<< Circle_r[i]<< endl;//原图圆心坐标和半径
cout << cvRound(circles[j][0])<< "\t"<< cvRound(circles[j][1])<< "\t"
<< cvRound(circles[j][2])<< endl;//在控制台输出圆心坐标和半径
}
}
//【6】显示效果图
//imshow("【效果图】", srcImage);
file.close();
waitKey();
return 0;
}效果图: