下篇文章惯性室内导航入门到精通(1)-加速度传感器
https://blog.csdn.net/qq_35651984/article/details/82845525
前言
学习卡尔曼滤波需要知道的知识
高斯分布,高斯白噪音,均值,方差,协方差矩阵
卡尔曼滤波有什么用
卡尔曼滤波可以有效预测向量的下一次走向,并不断优化回归,使预测更精确。总之就是:预测+自我调整。在这里,可以拿来预测室内运动的走向,减少干扰。
什么是卡尔曼滤波
卡尔曼是匈牙利数学家。我们学习的正是源于他的博士论文和1960年发表的论文《A New Approach to Linear Filtering and Prediction Problems》如果对这编论文有兴趣,可以到这里的地址下载:http://www.cs.unc.edu/~welch/kalman/media/pdf/Kalman1960.pdf
举个栗子
大家好,我是曹冲,今天孙权送了一头大象过来,父王想知道大象的重量。于是我想了个办法,把象放到大船上,在水面所达到的地方做上记号,再让船装载其他东西(当水面也达到记号的时候),称一下这些东西,比较下。但在这个时代的秤误差很大,况且大象在船上蹦蹦跳跳,水面起起伏伏,小河也有水波,误差很大。而我有强迫症,有没有办法得到更精确的重量呢??
这时候,博主告诉我。你可以先估计下一次测量的重量。根据我多年秤象的经验,误差大概在400斤左右。由于大象的重量是不变的,这头比较肥,所以我估计有1500斤,估计的误差为500斤(由于估计误差和秤象误差叠加,误差会增大,500平方=300平方+400平方)。然后用刻舟秤石头,获得大象重量1600斤,误差300斤。 这时候出来两个重量,我该相信那个重量呢?
这时候,博主又跳出来了。你可以计算两个重量的权重。预测的权重为kg=0.609(预测的平方/预测的平方+秤象的平方2500/2500+1600)(注,在卡尔曼中kg应该为平方,不用开根号)。最后我们能得到估计的实际的重量 1500斤+0.609*(1600-1500)=1560斤
不是说卡尔曼是预测+自我调整吗? 所以我还要修改我的预测值。
((1-kg)*这次估计误差的平方 )最后整体开方,得到下次的估计误差316斤,下次我就用316斤来计算,这样,连续秤象n次,就可以得到大象精确的重量了。

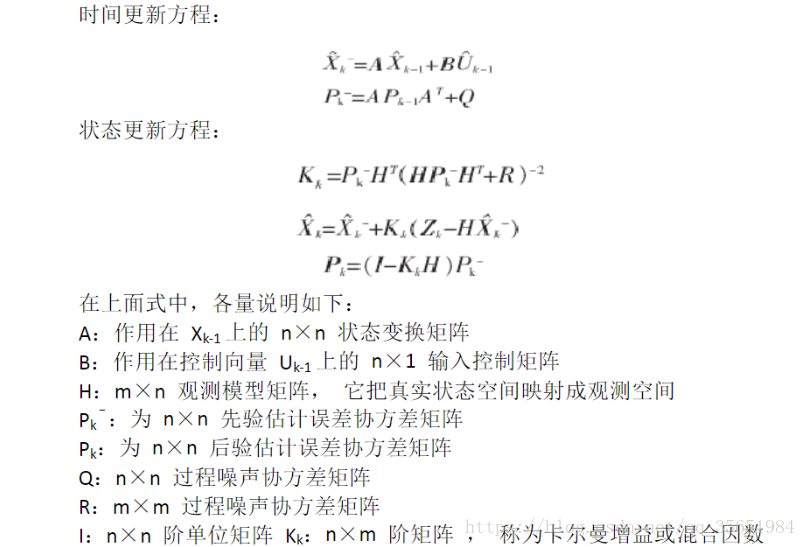
这就是卡尔曼的核心的原理,只要搞懂下面的五个公式,就能基本理解卡尔曼滤波了。
在这里我就不详细介绍了。只要理解上面的栗子,很快就能学会。
推荐的卡尔曼详解:https://blog.csdn.net/u010720661/article/details/63253509
代码
创建Kalman类以及实例化。
用卡尔曼滤波实现定位中,主要用于过滤RSSI。
class Kalman
{
public:
Kalman(double Q, double R);
double KalmanFilter(double value);
private:
double startValue; //k-1时刻的滤波值,即是k-1时刻的值
double kalmanGain; // Kalamn增益
double A; // x(n)=A*x(n-1)+u(n),u(n)~N(0,Q)
double H; // z(n)=H*x(n)+w(n),w(n)~N(0,R)
double Q; //预测过程噪声偏差的方差
double R; //测量噪声偏差,(系统搭建好以后,通过测量统计实验获得)
double P; //估计误差协方差;
};
#endif // KALMAN_H
kalman_1=new Kalman(9.0,100.0);//预测误差的方差,噪声误差的方差
kalman_2=new Kalman(9.0,100.0);
kalman_3=new Kalman(9.0,100.0);
构造函数
Kalman::Kalman(double Q, double R)//预测误差的方差,噪声误差的方差
{//初始化
A=1;
H=1;
P=10;//下一时刻的协方差,初始化随意
this->Q=Q;
this->R=R;
startValue=50;
}
运算
double Kalman::KalmanFilter( double value)//传入测量值
{
//预测下一时刻的值
double predictValue = A* startValue;
//求预测下一时刻的协方差
P = A*A*P + Q; //计算先验均方差 p(n|n-1)=A^2*p(n-1|n-1)+q
//计算kalman增益
kalmanGain = P*H / (P*H*H + R); //Kg(k)= P(k|k-1) H’ / (H P(k|k-1) H’ + R)
//修正结果,即计算滤波值
startValue = predictValue + (value - predictValue)*kalmanGain; //利用残余的信息改善对x(t)的估计,给出后验估计,这个值也就是输出 X(k|k)= X(k|k-1)+Kg(k) (Z(k)-H X(k|k-1))
//更新后验估计
P = (1 - kalmanGain*H)*P;//计算后验均方差 P[n|n]=(1-K[n]*H)*P[n|n-1]
return startValue;
}
最后,在需要滤波的位置,放置卡尔曼算法
rssi[0]=kalman_1->KalmanFilter(rssi[0]);
rssi[1]=kalman_2->KalmanFilter(rssi[1]);
rssi[2]=kalman_3->KalmanFilter(rssi[2]);