如下图所示:
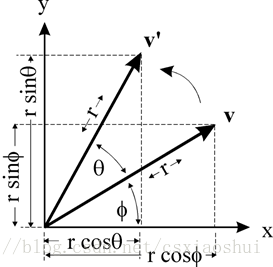
如图所示点v 绕 原点旋转θθ 角,得到点v’,假设 v点的坐标是(x, y) ,那么可以推导得到 v’点的坐标(x’, y’)(设原点到v的距离是r,原点到v点的向量与x轴的夹角是ϕϕ )
![]()
![]()
![]()
![]()
![]()
![]()
x=rcosϕy=rsinϕx=rcosϕy=rsinϕ
x′=rcos(θ+ϕ)y′=rsin(θ+ϕ)x′=rcos(θ+ϕ)y′=rsin(θ+ϕ)
通过三角函数展开得到
x′=rcosθcosϕ−rsinθsinϕx′=rcosθcosϕ−rsinθsinϕ
y′=rsinθcosϕ+rcosθsinϕy′=rsinθcosϕ+rcosθsinϕ
带入x和y表达式得到
x′=xcosθ−ysinθx′=xcosθ−ysinθ
y′=xsinθ+ycosθy′=xsinθ+ycosθ
写成矩阵的形式是:
[x′y′]=[cosθsinθ−sinθcosθ]∗[xy][x′y′]=[cosθ−sinθsinθcosθ]∗[xy]
尽管图示中仅仅表示的是旋转一个锐角θθ的情形,但是我们推导中使用的是三角函数的基本定义来计算坐标的,因此当旋转的角度是任意角度(例如大于180度,导致v’点进入到第四象限)结论仍然是成立的。
原文:https://blog.csdn.net/csxiaoshui/article/details/65446125?utm_source=copy