一、预习知识
首先,了解本节知识前,你需要了解矩阵乘法知识,然后,还需要一些简单的齐次坐标的知识。
推荐的博客:
二维图形的几何变换矩阵推导与齐次方程的深入理解
齐次坐标(Homogeneous Coordinate)的理解
二、矩阵推导
图画的不太好,见谅。
首先我们需要知道一个坐标点在三维空间坐标系中绕任意一轴旋转的时候,其坐标的值只会改变其中的两个,有一个值是始终不变的,也就是讲该点无论怎样旋转,都会在一个平面上。
接下来我们看下面这个图,坐标(X1,Y1,Z1)、(X3,Y3,Z3)、(X5,Y5,Z5)均为初始点,各点距离坐标原点为1,分别与+x轴、+y轴、+z轴的间隔角为α1、α2、α3,旋转角分别为β1、β2、β3。
现在我们将这些坐标均转换为齐次坐标,分别为
(X1,Y1,Z1,1)、(X3,Y3,Z3,1)、(X5,Y5,Z5,1)

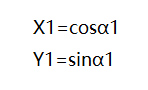
1.对于三坐标轴旋转,当绕着Z轴旋转时(Z1=Z2 )
旋转前点:
旋转后点:
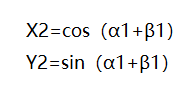
化简得:(X2,Y2)= (X1cosβ1-Y1sinβ1,Y1cosβ1+X1sinβ1)
列矩阵求结果:
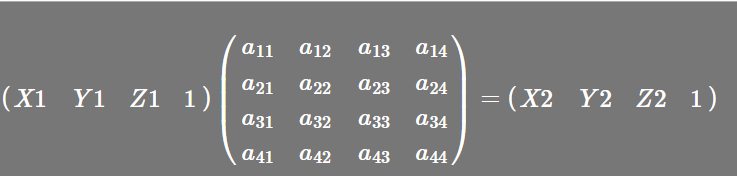
带入(X2,Y2)的值,解得:

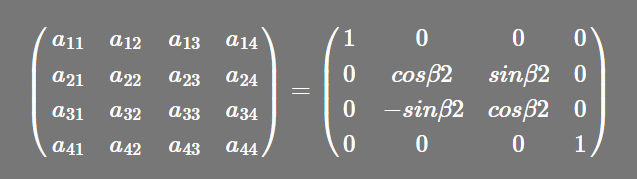
2.对于三坐标轴旋转,当绕着X轴旋转时(X3=X4)
同理可得:
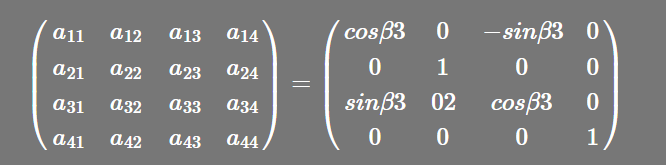
3.对于三坐标轴旋转,当绕着Y轴旋转时(Y5=Y6)
同理可得: