#include "stdafx.h"
#include <iostream>
#include <vector>
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
using namespace cv;
using namespace std;
//全局变量
Mat src, src_gray, dst_norm_scaled;
int thresh = 110;
int max_thresh = 150;
int maxCorners = 23;
int maxTrackbar = 100;
char* source_window = "Source image";
char* corners_window = "Corners detected";
void cornerHarris_demo(int, void*);
void cornerShiTomasi_demo(int, void*);
int main()
{
src = imread("C:\\哀.jpg", 1);
cvtColor(src, src_gray, CV_BGR2GRAY);
//创建窗口和滑动条
namedWindow(source_window, CV_WINDOW_AUTOSIZE);
createTrackbar("Harris: ", source_window, &thresh, max_thresh, cornerHarris_demo);
createTrackbar("ShiTomasi:", source_window, &maxCorners, maxTrackbar, cornerShiTomasi_demo);
namedWindow(corners_window, CV_WINDOW_AUTOSIZE);
namedWindow(source_window, CV_WINDOW_AUTOSIZE);
cornerHarris_demo(0, 0);
cornerShiTomasi_demo(0, 0);
waitKey(0);
return(0);
}
void cornerHarris_demo(int, void*)
{
Mat dst, dst_norm;
dst = Mat::zeros(src.size(), CV_32FC1);
///参数
int blockSize = 2;
int apertureSize = 3;
double k = 0.04;
///检测角点
cornerHarris(src_gray, dst, blockSize, apertureSize, k, BORDER_DEFAULT);
/// 标准化
normalize(dst, dst_norm, 0, 255, NORM_MINMAX, CV_32FC1, Mat());
convertScaleAbs(dst_norm, dst_norm_scaled);
/// 画出角点
for (int j = 0; j < dst_norm.rows; j++)
{
for (int i = 0; i < dst_norm.cols; i++)
{
if ((int)dst_norm.at<float>(j, i) > thresh)
{
circle(dst_norm_scaled, Point(i, j), 5, Scalar(0), -1, 8, 0);
circle(src, Point(i, j), 5, Scalar(255, 0, 0), -1, 8, 0);
}
}
}
/// 显示结果
imshow(corners_window, dst_norm_scaled);
imshow(source_window, src);
}
void cornerShiTomasi_demo(int, void*)
{
if (maxCorners < 1) { maxCorners = 1; }
/// Shi-Tomasi算法的参数
vector<Point2f> corners;
double qualityLevel = 0.01;
double minDistance = 10;
int blockSize = 3;
bool useHarrisDetector = false;
double k = 0.04;
/// 拷贝原图像
Mat cormat;
///应用角点检测:检测图中的强角点
goodFeaturesToTrack(src_gray,
corners,
maxCorners,
qualityLevel,
minDistance,
Mat(),
blockSize,
useHarrisDetector,
k);
/// 画出被检测到的角点
for (int i = 0; i < corners.size(); i++) {
circle(dst_norm_scaled, corners[i], 5, Scalar(255), 2, 8, 0);
circle(src, corners[i], 4, Scalar(0, 255, 0), 2, 8, 0);
}
//显示结果
imshow(corners_window, dst_norm_scaled);
imshow(source_window, src);
}
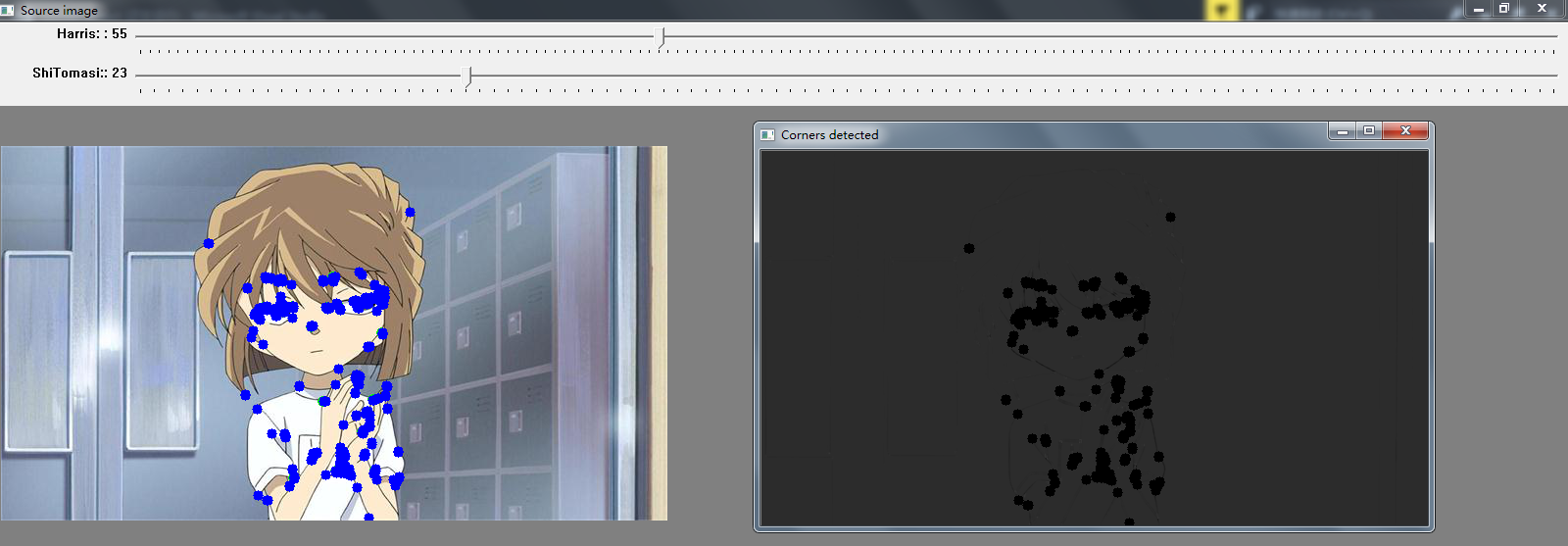
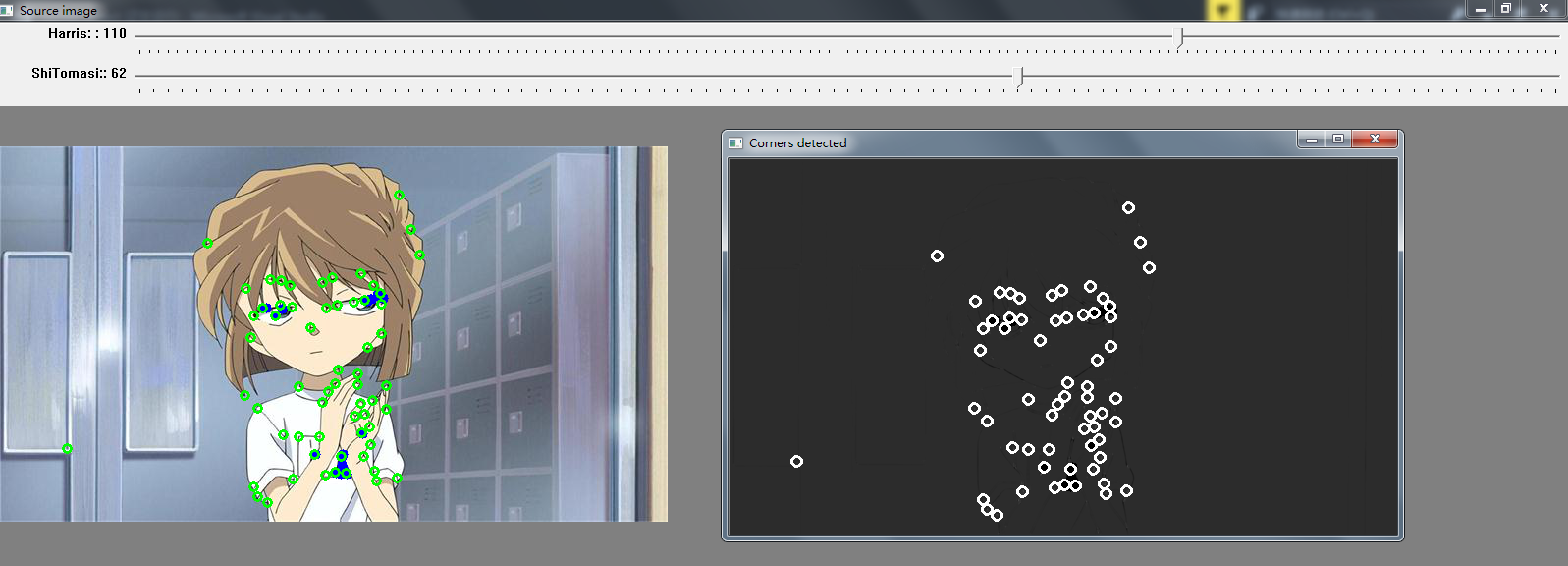
结果:
蓝色点为Harris算法检测到的角点;绿色点为ShiTomasi算法检测到的角点
参考:毛星云 《OpenCV3编程入门》