最近看irrlicht源码,在include/core中的vector2d.h中有一个函数rotateBy()。其计算原理如下:
// vector2d的一个成员函数
void rotateBy(f64 degrees, const vector2d<T>& center)
{
degrees *=gradPI2;//转换为弧度制
T cs = (T)cos(degrees);
T sn = (T)sin(degrees);
// 先将旋转中心点平移到原点,同时也要平移待旋转点
X -= center.X;
Y -= center.Y;
// 设置当前点坐标为旋转后的点
set(X*cs - Y*sn, X*sn + Y*cs);
// 将旋转后的点平移回去
X += center.X;
Y += center.Y;
}- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
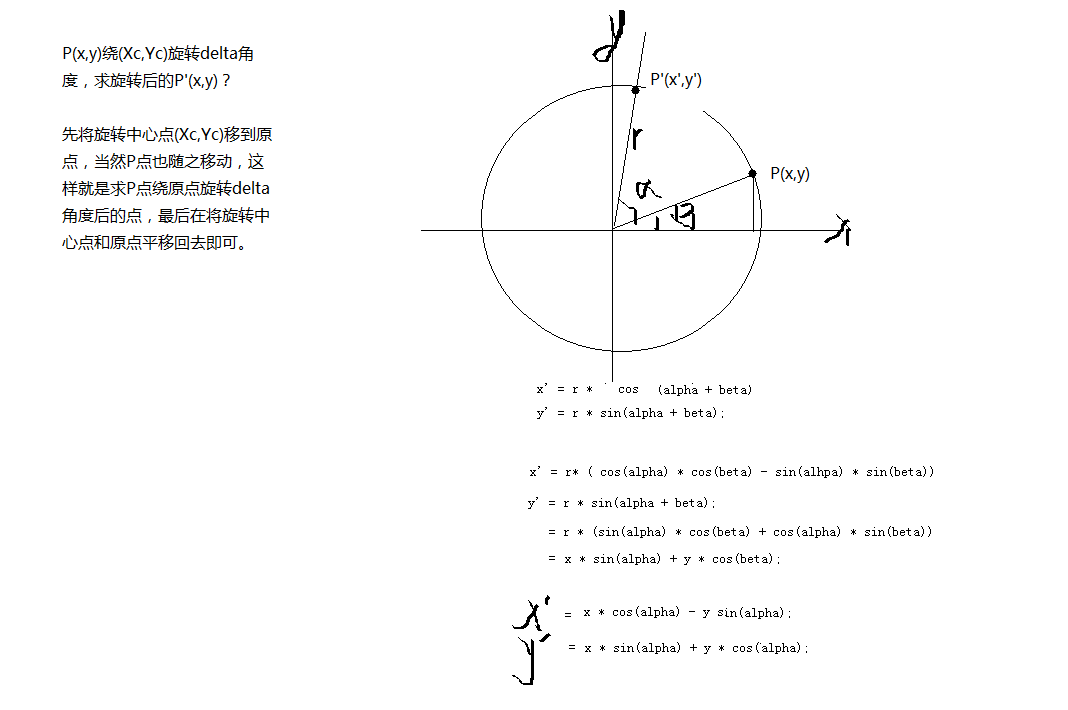
由上图可以看出,其实P点绕原点旋转,如果转换到三维空间,其实就是三维点P绕坐标轴z旋转