在图像拼接中,得到了两张图像的特征匹配,两个点集分别记作XX和X′X′。用单应性变换来拟合二者的关系,可表达为
其中
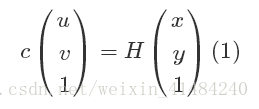
HH是个3×3的矩阵,有8个自由度,所以待求未知参数有8个,
DLT算法推导过程如下:将(1)式展开,前2行分别被第3行相除,得到
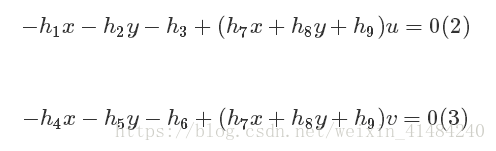
式(2)、式(3)可以整理为
其中,
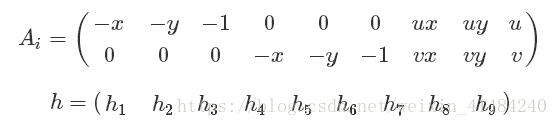
由未知变量的个数可知,求解出H至少需要4对匹配点。通常情况下为了得到更稳定的结果,会用到多于4对的特征匹配。所以,这个方程会变成超定的,可以将最小二乘解作为最后的解。
方程的最小二乘解有一个既定的结论,即对A进行SVD分解,A的最小的奇异值对应的右奇异向量即是h的解。对h做reshape得到H。