每天一分钟,带你读遍机器人顶级会议文章
标题:Performance Evaluation of 3D Correspondence Grouping Algorithms
作者:Jiaqi Yang,Ke Xian,Yang Xiao,Zhiguo Cao
来源:3dv 2017 ( International Conference on 3D Vision)
编译:博主
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权
摘要
在3D计算机视觉中正确的特征匹配非常重要,因此本文中对几种广泛使用的3D对应分组算法进行了全面细致的评估。通常而言,一个好的对于分组算法,应该能够以一组初始匹配为基准,在保证精度率和召回率的前提下恢复出所有可能的匹配点。
基于以上认识,本文作者在三个标准数据集上分别针对形状检索、3D目标检测和点云匹配设计了实验。应用场景的多样性带来了大量干扰,不仅包括点云噪声、点云密度差异、点云杂波、点云遮挡和点云部分重叠等问题。除此之外,不同比例的内点率和内点分布给综合评估也带来较大的影响。
最后,本文基于定量的评估结果,从算法性能和效率做出了一个优缺点的总结。
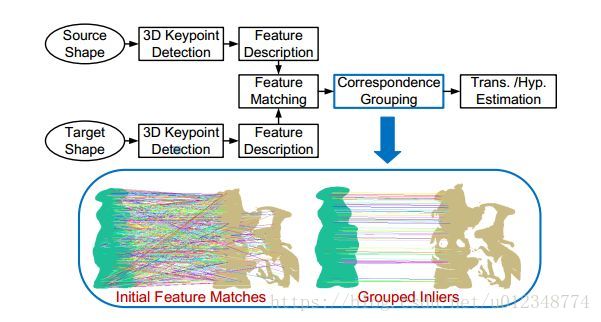
下图展示了3D配准的基本框架。
下图是各种算法的配准结果。
