1 模型设计
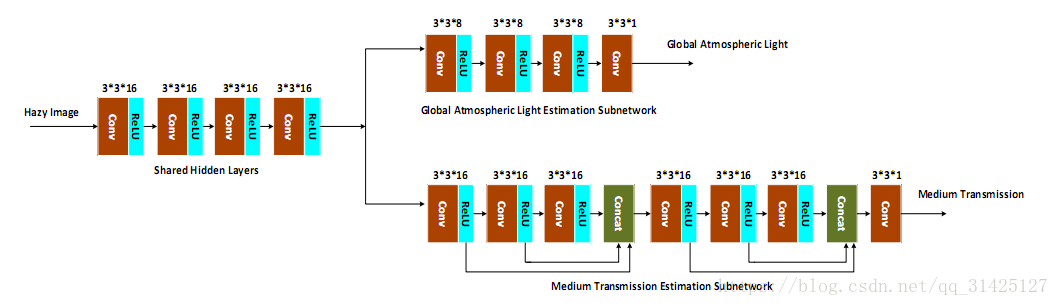
post-processing:对网络估计出的传播图又用了导向滤波器进行后续的优化
2 训练
数据集 NYU-V2 Depth dataset
前提:(1)全局大气光B服从[0.7.1]均匀分布;(2)大气散射系数从[0.6,2.8]随机选择;(3)针对每个无雾清晰图像以及对应的深度图,我们随机选择5个全局大气感和大气散射系数,人工合成有雾图像;(4)所有样本采样到207x154的大小
训练集:1300张 x 5
验证集:101张 x 5网络参数
权重:高斯初始化
学习率:0.001 动量参数:0.9
batch size:32
损失函数:大气光估计子网络的损失函数是:SSIM误差;传播图估计子网络的损失函数是:均方误差;因此,整个网络的损失函数上面两个误差之和。
优化方法:Adam
框架:Tensorflow对比实验
卷积核个数的实验比较:整个网络的卷积核个数(特征图个数)候选:8、16、32、64
卷积核大小的实验比较:整个网络的卷积核大小(局部感受野)候选:3x3、5x5、7x7
共享层网络深度的实验比较:共享层网络深度候选:3、4、7、9
传输子网络深度的实验比较:传输层子网络深度候选:2DB、3DB、5DB(dense block)
3 测试
合成图像测试
比较内容:
1、定量比较:MSE、PSNR、SSIM、Run time
2、定性比较:显示估计出的传播图以及去雾后的彩色图
测试集:未说明,看图应该也是NYU Depth dataset里的真实图像测试
比较内容:传播图的比较以及去雾后彩色图的比较