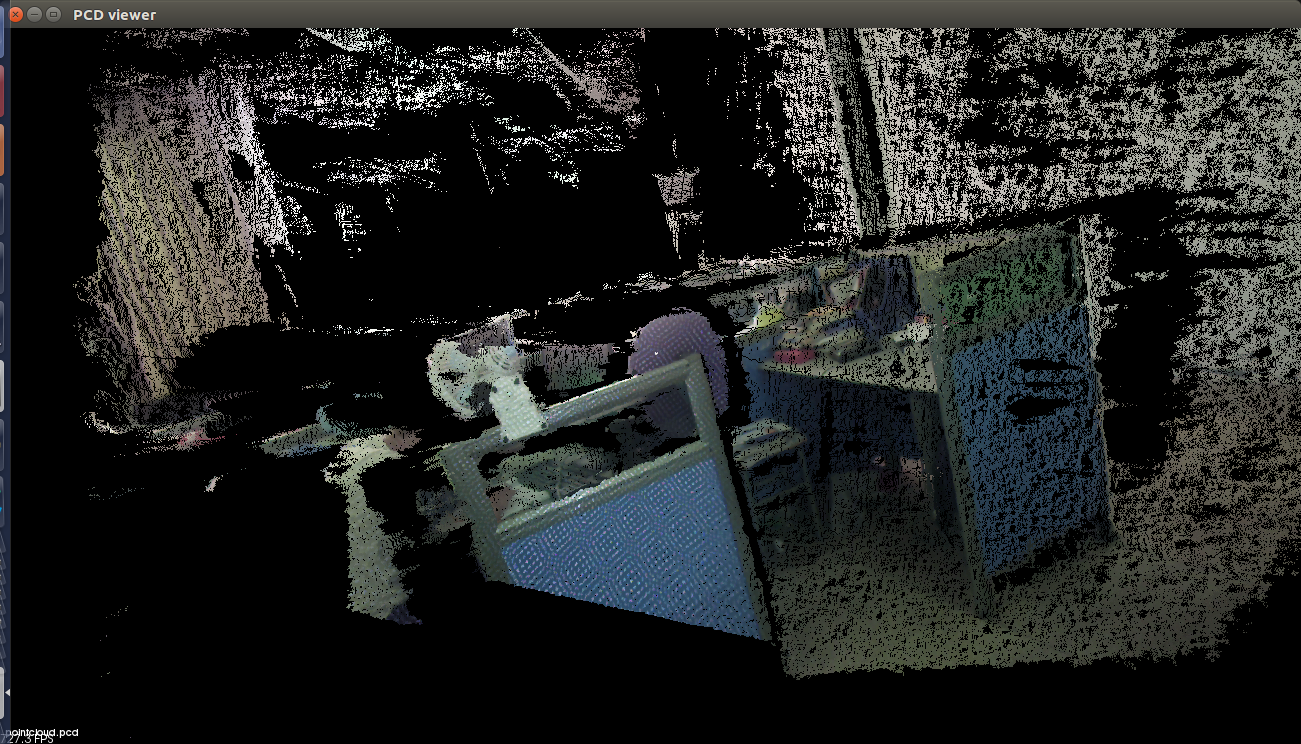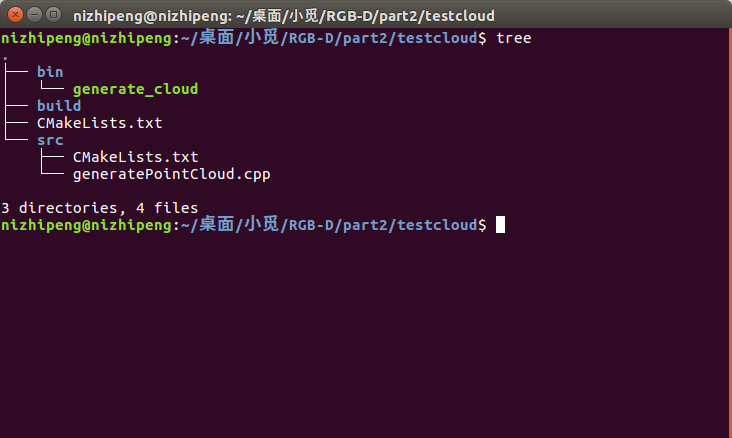
bin文件夹下为生成的可执行文件generate_cloud,执行时和data文件放在同一文件夹下。
图像数据来自小觅相机。
src下的源码,包括generatePointCloud.cpp和CMakeLists.txt
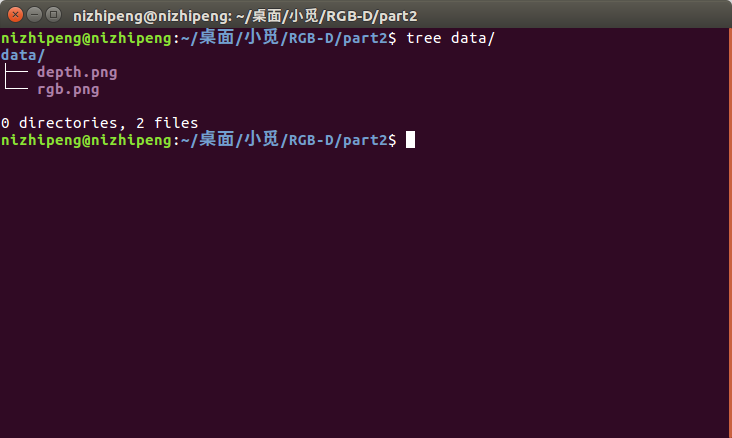
// C++ 标准库 #include <iostream> #include <string> //#include <unistd.h> using namespace std; // OpenCV 库 #include <opencv2/core/core.hpp> #include <opencv2/highgui/highgui.hpp> //#include <pcl/visualization/cloud_viewer.h> // PCL 库 #include <pcl/io/pcd_io.h> #include <pcl/point_types.h> // 定义点云类型 typedef pcl::PointXYZRGBA PointT; typedef pcl::PointCloud<PointT> PointCloud; //pcl::visualization::CloudViewer viewer("pcd viewer"); // 相机内参 const double camera_factor = 1000; /* const double camera_cx = 325.5; const double camera_cy = 253.5; //nyuv2数据集:http://cs.nyu.edu/~silberman/datasets/ const double camera_fx = 518.0; const double camera_fy = 519.0; */ const double camera_cx = 682.3; const double camera_cy = 254.9; const double camera_fx = 979.8; //小觅 const double camera_fy = 942.8; // 主函数 int main( int argc, char** argv ) { // 读取./data/rgb.png和./data/depth.png,并转化为点云 // 图像矩阵 cv::Mat rgb, depth; // 使用cv::imread()来读取图像 // API: http://docs.opencv.org/modules/highgui/doc/reading_and_writing_images_and_video.html?highlight=imread#cv2.imread rgb = cv::imread( "./data/rgb.png" ); // rgb 图像是8UC3的彩色图像 // depth 是16UC1的单通道图像,注意flags设置-1,表示读取原始数据不做任何修改 depth = cv::imread( "./data/depth.png", -1 ); // 点云变量 // 使用智能指针,创建一个空点云。这种指针用完会自动释放。 PointCloud::Ptr cloud ( new PointCloud ); // 遍历深度图 for (int m = 0; m < depth.rows; m++) for (int n=0; n < depth.cols; n++) { // 获取深度图中(m,n)处的值 ushort d = depth.ptr<ushort>(m)[n]; // d 可能没有值,若如此,跳过此点 if (d == 0 || d >= 4096) continue; //获得一个点的位置与颜色 // d 存在值,则向点云增加一个点 PointT p; // 计算这个点的空间坐标 p.z = double(d) / camera_factor; p.x = (n - camera_cx) * p.z / camera_fx; p.y = (m - camera_cy) * p.z / camera_fy; // 从rgb图像中获取它的颜色 // rgb是三通道的BGR格式图,所以按下面的顺序获取颜色 p.b = rgb.ptr<uchar>(m)[n*3]; p.g = rgb.ptr<uchar>(m)[n*3+1]; p.r = rgb.ptr<uchar>(m)[n*3+2]; // 把p加入到点云中 cloud->points.push_back( p ); } /* // viewer.showCloud(cloud); // sleep(100);////#include <unistd.h> // return 0; */ // 设置并保存点云 cloud->height = 1; cloud->width = cloud->points.size(); cout<<"point cloud size = "<<cloud->points.size()<<endl; cloud->is_dense = false; pcl::io::savePCDFile( "./pointcloud.pcd", *cloud ); // 清除数据并退出 cloud->points.clear(); cout<<"Point cloud saved."<<endl; return 0; }
CMakeLists.txt
# 增加PCL库的依赖 FIND_PACKAGE( PCL REQUIRED ) list(REMOVE_ITEM PCL_LIBRARIES "vtkproj4") # use this in Ubuntu 16.04 # 增加opencv的依赖 FIND_PACKAGE( OpenCV REQUIRED ) # 添加头文件和库文件 ADD_DEFINITIONS( ${PCL_DEFINITIONS} ) INCLUDE_DIRECTORIES( ${PCL_INCLUDE_DIRS} ) LINK_LIBRARIES( ${PCL_LIBRARY_DIRS} ) ADD_EXECUTABLE( generate_cloud generatePointCloud.cpp ) TARGET_LINK_LIBRARIES( generate_cloud ${OpenCV_LIBS} ${PCL_LIBRARIES} )
和src文件夹在同一文件夹下的CMakeLists.txt
CMAKE_MINIMUM_REQUIRED( VERSION 2.8 ) PROJECT( slam ) SET(CMAKE_CXX_COMPILER "g++") SET( CMAKE_BUILD_TYPE Debug ) SET(EXECUTABLE_OUTPUT_PATH ${PROJECT_SOURCE_DIR}/bin) SET(LIBRARY_OUTPUT_PATH ${PROJECT_SOURCE_DIR}/lib) INCLUDE_DIRECTORIES( ${PROJECT_SOURCE_DIR}/include ) LINK_DIRECTORIES( ${PROJECT_SOURCE_DIR}/lib) ADD_SUBDIRECTORY( ${PROJECT_SOURCE_DIR}/src )
编译后可执行文件在bin中。