看自刘国庆的演讲,做简单的总结。(没有ppt,全靠截图)
kinect的结构 一个彩色相机(1920*1080) 一个深度相机(一个灰度相机512*414可以感知红外光+红外发射)
这里提出了几个问题:
图像畸变(来源自相机自身性质,透镜畸变)-----标定
深度图像深度值是否正确?需要深度校准------校准
图像配准?怎么区获取两个不同的分辨率的图的配准----配准
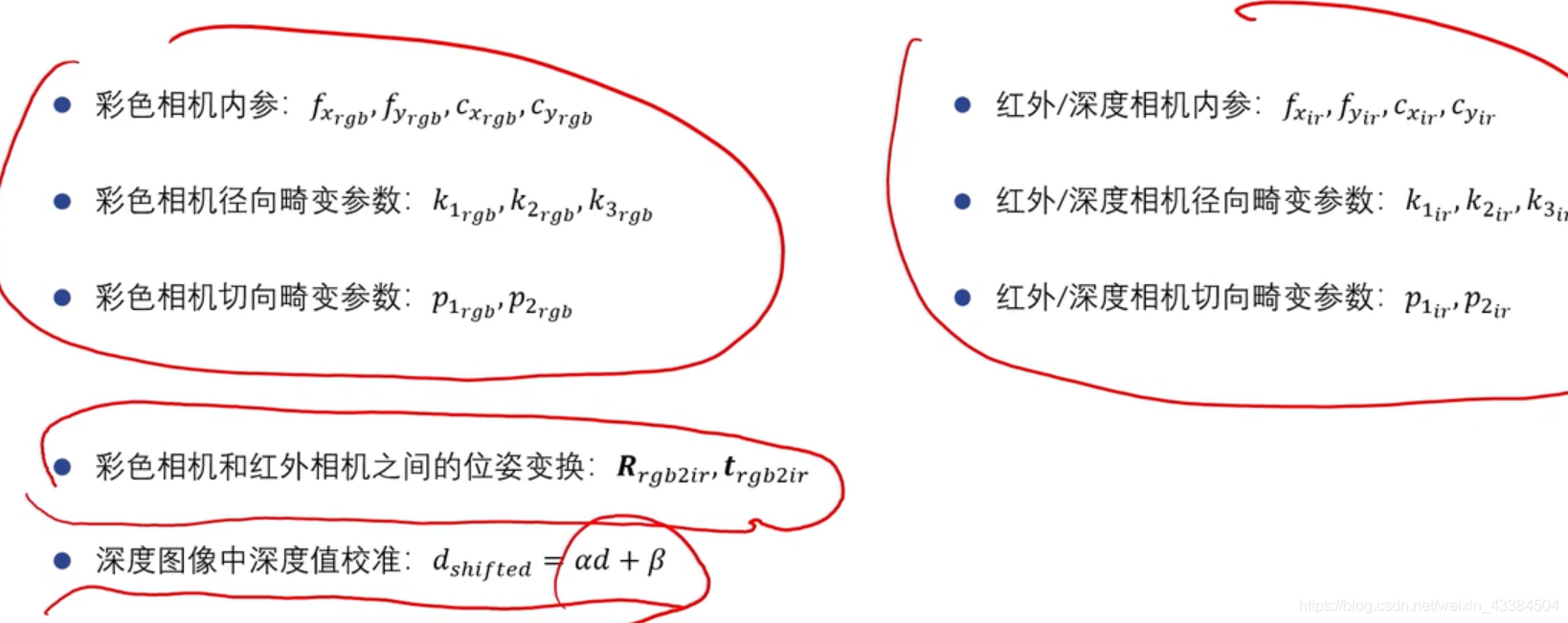
按照标定的步骤获取 两个相机的内参
还有两个相机之间的rt
看自刘国庆的演讲,做简单的总结。(没有ppt,全靠截图)
kinect的结构 一个彩色相机(1920*1080) 一个深度相机(一个灰度相机512*414可以感知红外光+红外发射)
这里提出了几个问题:
图像畸变(来源自相机自身性质,透镜畸变)-----标定
深度图像深度值是否正确?需要深度校准------校准
图像配准?怎么区获取两个不同的分辨率的图的配准----配准
按照标定的步骤获取 两个相机的内参
还有两个相机之间的rt
