- 《Recurrent Convolutional Fusion for RGB-D Object Recognition》
2018, Mohammad Reza Loghmani et al. RCFusion
作者通过从网络的不同levels来抽取特征,结合RGB和Depth的互补信息,来产生紧凑的和高辨别力的多模态特征。
1.RCFusion网络结构:
网络从CNNs的多个隐层来为RGB和Depth提取特征,另外使用正交损失来作用于RGB和Depth的特征,加强双流网络学习互补信息。
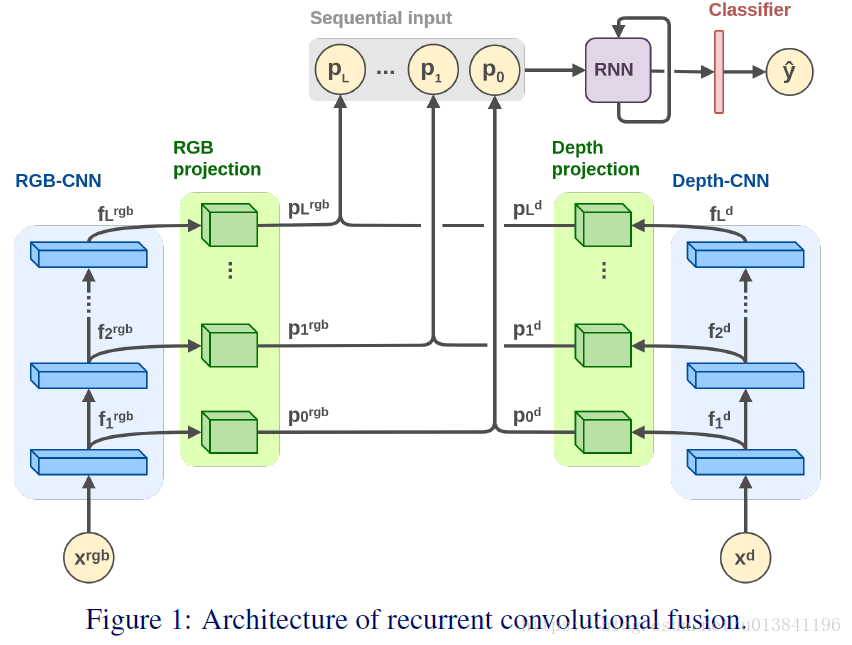
2.RCFusion有三个主要的阶段:
阶段1:多级特征抽取:双流卷积网络结构,从网络的不同levels来分别提取RGB和Depth特征。
阶段2:特征映射和拼接:从RGB和Depth单独提取到的特征通过映射模块(projection blocks)
后拼接(concat),形成相对应的RGB-D特征。
阶段3:循环多模态融合:从CNNs的不同levels提取顺序的RGB-D特征,后送入RNN网络,产生一个紧凑的和有区分力的多模态特征。
3.实现细节:
1) RGB-/Depth-CNN: 采用ResNet-18,约40000 parameters,在ImageNet上进行预训练。
2) Projection blocks:映射模块转换feature maps成一个1xpd的特征向量,通过两个全卷层和一个全局最大池化层。映射模块的一个卷积集中在利用空间维度(高和宽),pd个7x7的滤波器;第二个卷积利用深度(depth),pd个1x1的滤波器;最后,全局最大池化作用在每一个channels上,形成特定pd维数的特征向量。
RNN: 为了平衡网络的性能和参数的数量,作者使用RNN(GRU)来提取更加紧凑和有区分力的多模态特征,利用不同层级的时序空间特征。
4.Loss function: a standard classification loss and an orthogonality loss.
其中,
cross-entropy loss为:
:orthogonality loss为:
表示为第i层的正则项权重参数,
is the squared Frobenius norm,T表示转置。
表示最小化不同模态的重叠信息,学习更多的不同模态间的互补信息。
参考代码:
def ortho_loss(model1, model2):
model1_T = tf.transpose(model1)
mul = tf.matmul(model1_T,model2)
ortho_loss = tf.nn.l2_loss(mul)
return ortho_loss
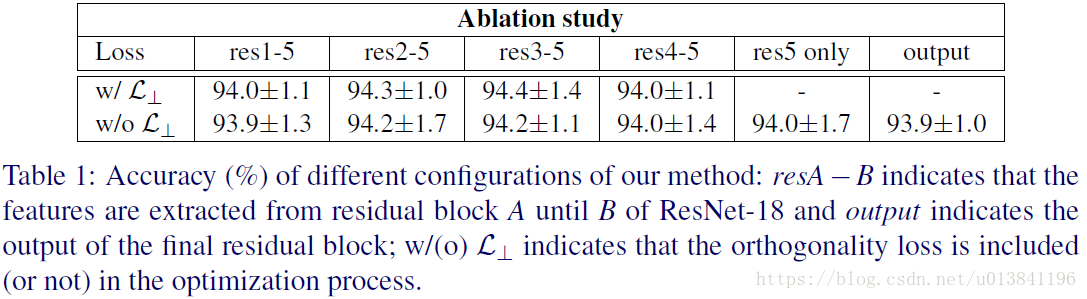
5.结果比较:
可知:正交损失的作用很小,抽取不同阶段的特征进行RNN提取特征会有不同效果,实际可能会根据不同的网络结构进行调试。
实验中:正交损失的权重设置为0.0001,pd=512.
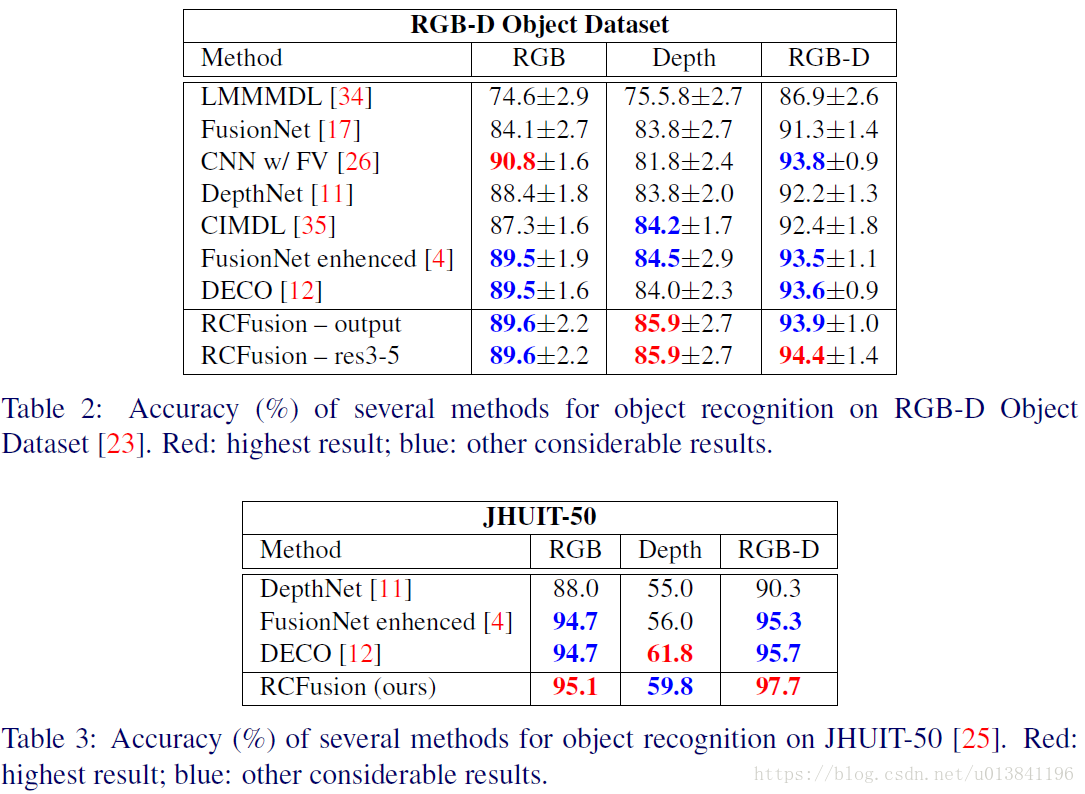
测试RGB-D Object Dataset和JHUIT-50结果:
小结:
引入正交损失和RGB-D单网络多级特征抽取和GRU融合多模态特征