1.初识网络流
网络流一直是初学者心中很难过去的一道坎,很多人说它是一个不像DFS/BFS那么直观的算法,同时网上也有各种参差不齐的材料,让人感到一知半解。
如果你也有这样的感觉,那么不要灰心,坚持住,因为网络流是组合优化理论的明珠,是你走向计算机理论深邃奥秘的第一步。
路径这个概念虽然非常基础,但是有着很多的应用,例如,可以把交通网络看成一个图,那么图上的路径就是一个合法的交通路线,我们可以通过最短路径算法求出最佳的路径。同样我们可以把社会网络,也就是人和人的关系看成一个网络,我们可以用路径来分析社会网络的各种性质关系;甚至我们可以把编写的程序看成一个图,可以通过路径建模程序当中的性质,例如,可以证明程序当中犯的某一些错误是否会发生,这些都是在图论的基础上建立的各种各样有趣的应用。
2.最大流问题的定义与基础
最大流问题属于图论的范畴,这里的图是有向有权图,边都有方向和权重,图中有很多节点,其中一个节点是起点,记作s,还有一个节点是终点,记作t。
可以这样理解最大流问题:我们希望把水从节点s送到终点t,水要通过管道来输送,这些管道就是图中的边,边都有权重,权重可以理解为管道的容量,否则可能会导致压力过大导致管道爆裂,那么,给定管道的限制,那么最大流是多少?
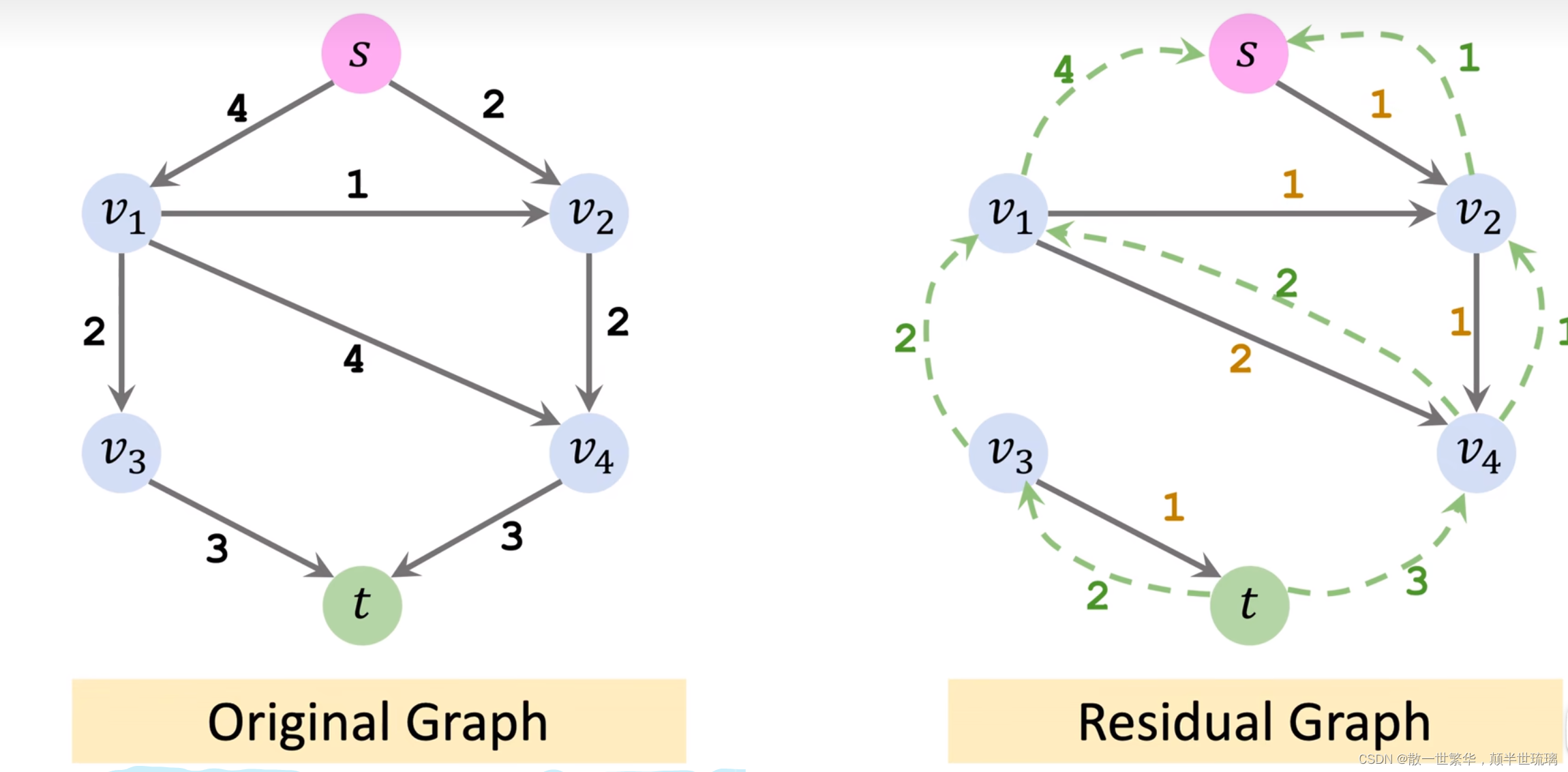
第一步创建residual graph,它的权重等于水管的空闲量,初始时没有水流,所以空闲量等于容量;
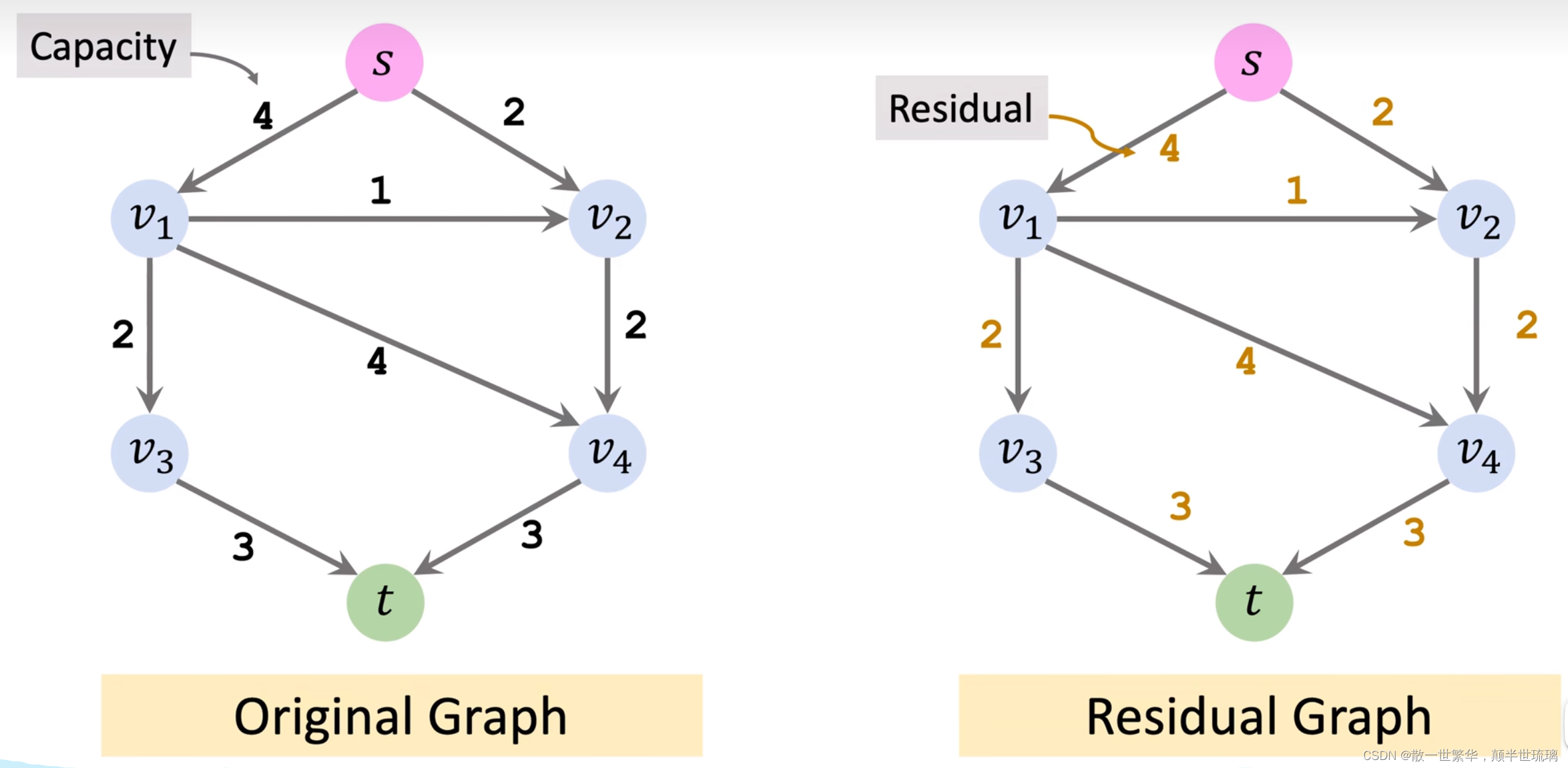
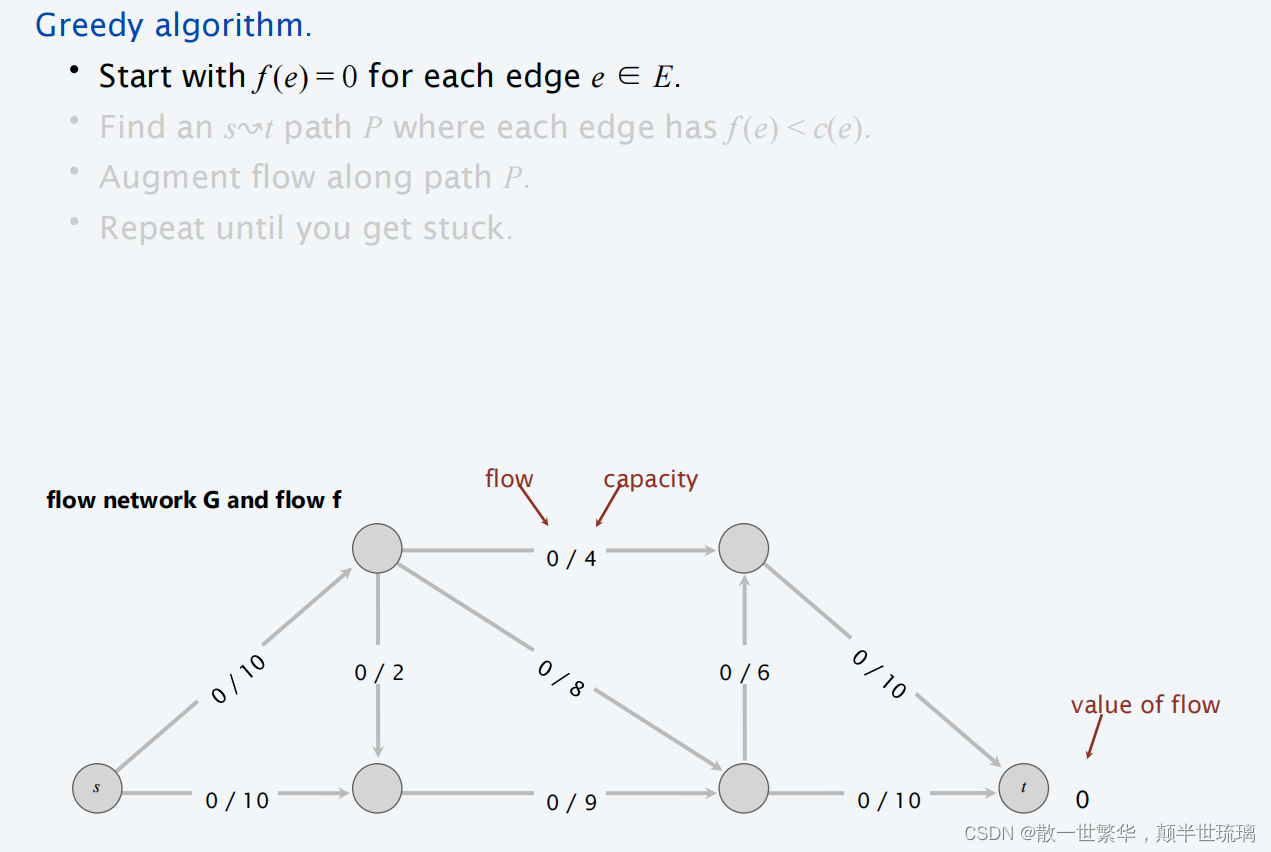
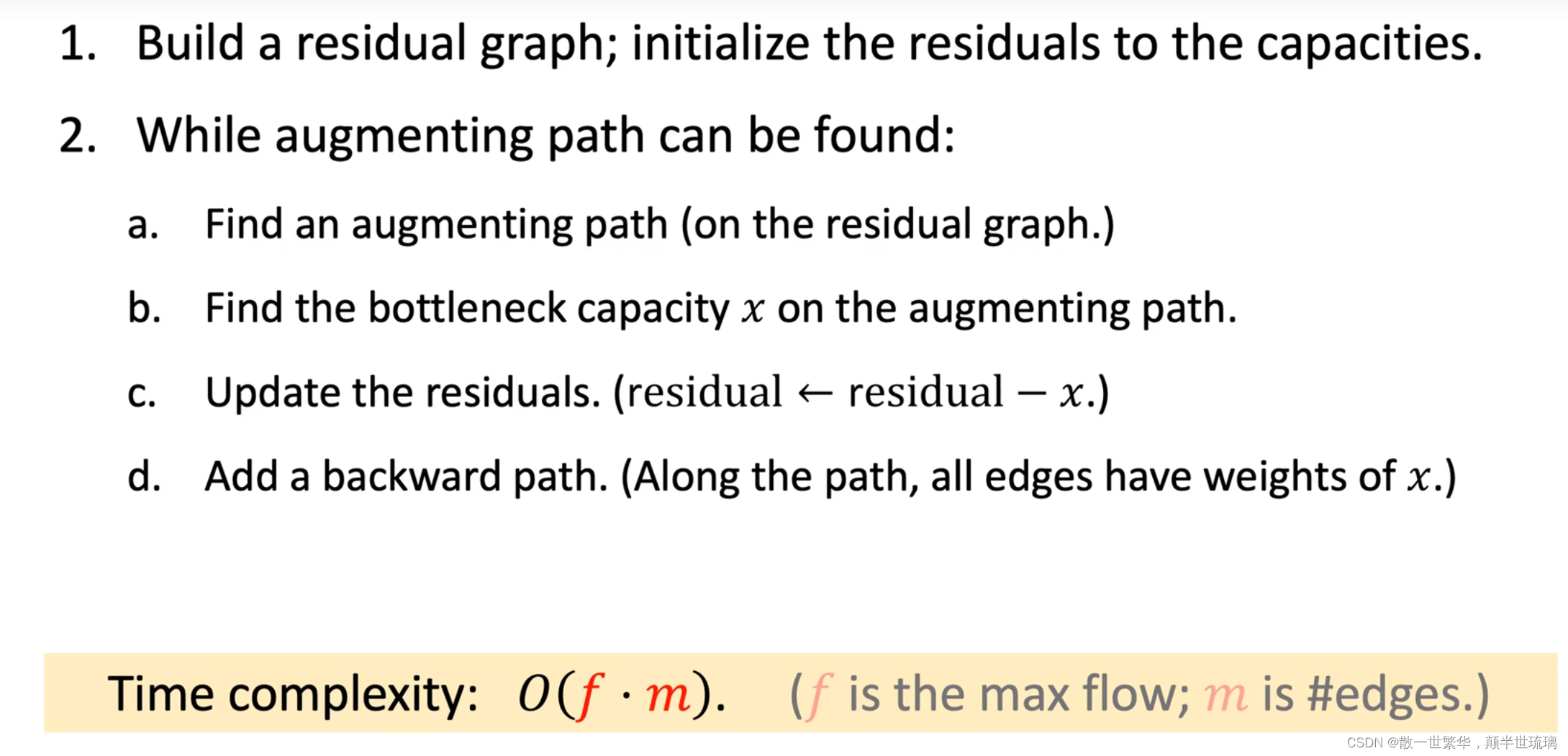
最直观的简单算法为:
第二步是在residual graph找到augumenting path,augumenting path是指从起点s到终点t的简单路径,寻找路径上最小的权重,假设最小权重为x,那么该路径下最多只能传输x单位的水流,再多的话,最弱的水管会爆裂。此外,我们让x单位的水流过这条路径,那么这条路径下所有边的空闲量都要减去x,不断重复第二步的过程,直到找不到起点到终点的路径,这就说明没有办法把更多的水从起点送到终点,这时候就应该终止循环!
**简单算法有时候会失败!**这种算法只能找到blocking flow阻塞流,阻塞流意思是把网络给阻塞了,没办法传输更多的水流,阻塞流未必是最大流。具体示例如下所示:
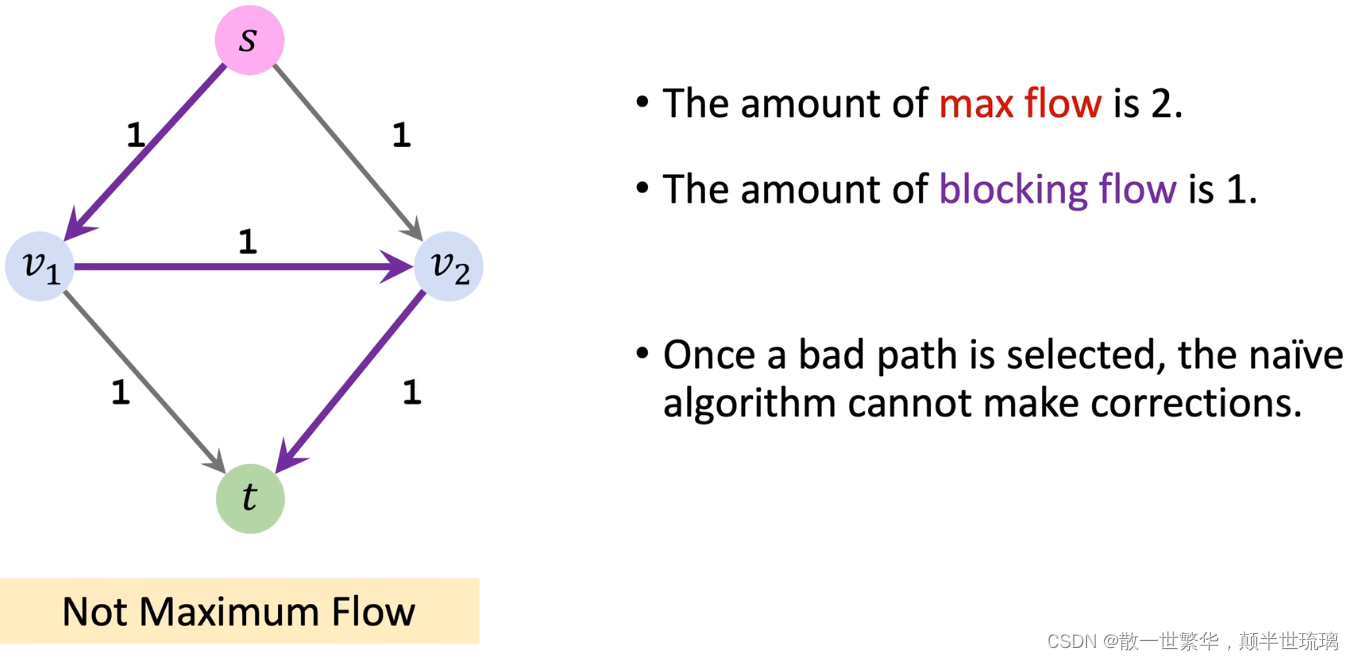
这说明简单算法不能保证结果是最大流,后序介绍的算法可以保证求出的结果一定是最大流。
3.Ford–Fulkerson algorithm
前面说简单算法不一定找到最大流,究其原因主要是简单算法不会反悔,不能纠正错误,一旦坏的路径被选中,算法就无法找到最大流。
但是Ford–Fulkerson algorithm一定可以找到最大流,因为它可以把不好的路径给撤销掉。
Ford–Fulkerson algorithm与简单算法相比,唯一的区别是添加一条反向的路径,这样一来,就算之前选择的路径不好,也可以原路撤销返回。
Ford-Fulkerson算法是一种用于解决网络最大流问题的经典算法。它基于寻找增广路径的思想,通过不断寻找增广路径来增加流量,直到无法找到增广路径为止。
该算法的步骤如下:
- 创建一个residual graph并初始化所有边的流量为0。
- 当存在从源节点到汇节点的增广路径时:
- 使用深度优先搜索或广度优先搜索来寻找一条增广路径。增广路径是指路径上的每条边的剩余容量大于0。
- 在找到增广路径后,通过更新路径上的边的剩余容量来增加流量。
- 更新路径上的边的剩余容量,即减少正向边的剩余容量,增加反向边的剩余容量。
- 当无法找到增广路径时,算法终止。此时,得到的流就是最大流。
需要注意的是,Ford-Fulkerson算法的时间复杂度很慢,并且会在某些情况下陷入无限循环,因此为了保证算法的终止和收敛性,通常需要采用其他技术,如Edmonds-Karp算法中使用的最短增广路径策略。
总之,Ford-Fulkerson算法是一种通过不断寻找增广路径来逐步增加流量的经典算法,用于解决网络最大流问题。
4.Edmonds-Karp Algorithm
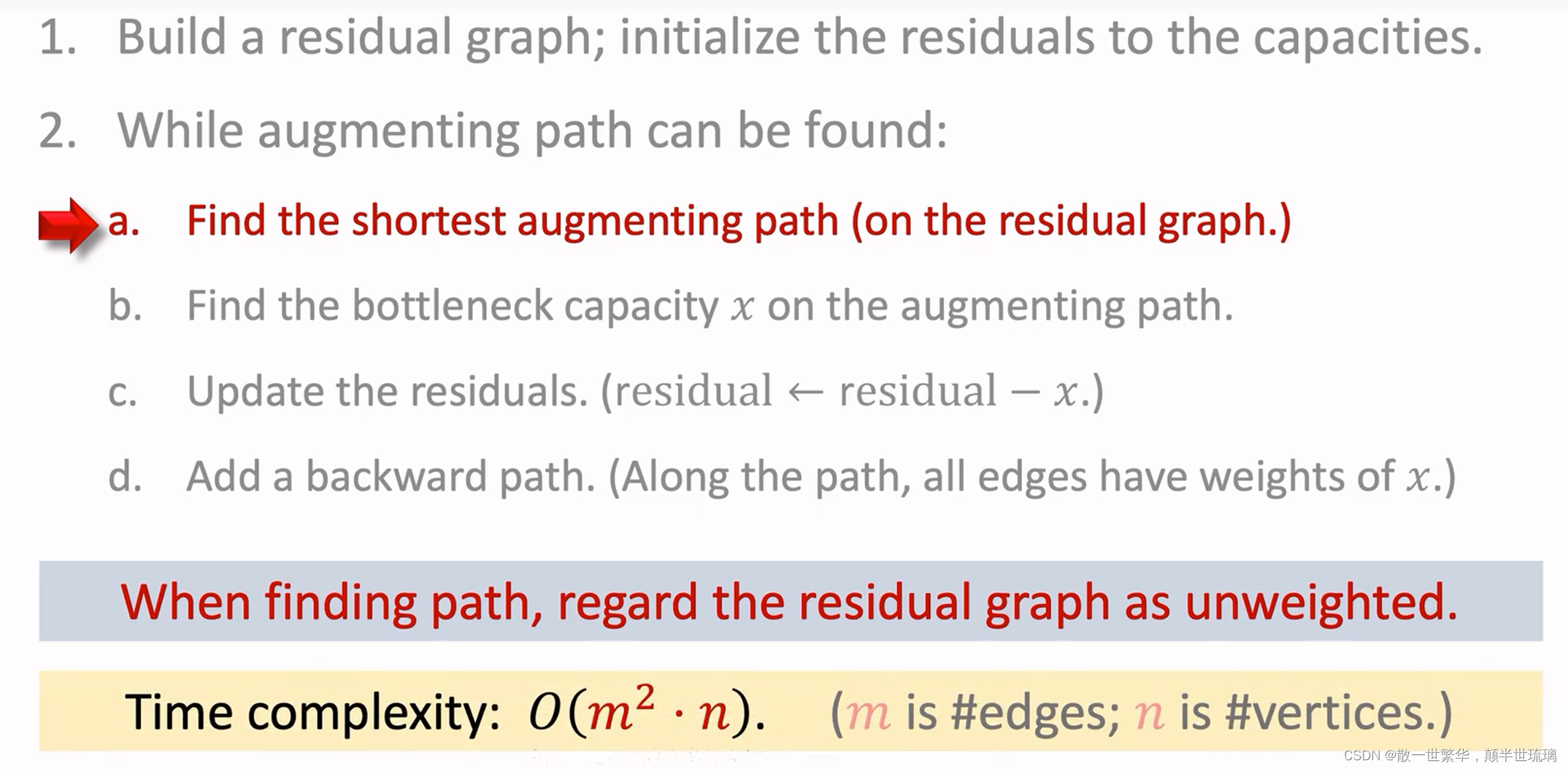
Edmonds-Karp论文发表在1972年,比Ford–Fulkerson algorithm晚了12年,Edmonds-Karp算法不是新的算法,而是Ford–Fulkerson algorithm算法的特例,Edmonds和Karp的贡献在于他们证明了更好的时间复杂度,时间复杂度不依赖于最大流的大小。Edmonds-Karp Algorithm与Edmonds-Karp Algorithm几乎完全一样,唯一的区别在于Edmonds-Karp Algorithm寻找路径的时候要用最短路径算法。
Edmonds-Karp算法是Ford-Fulkerson算法的一种改进版本,用于求解网络最大流问题。它通过使用广度优先搜索来选择最短增广路径,从而提高算法的效率和收敛速度。
以下是Edmonds-Karp算法的详细步骤:
- 初始化所有边的流量为0。
- While 存在从源节点到汇节点的增广路径:
- 使用广度优先搜索来找到一条最短增广路径。最短增广路径是指路径上的边数最少,即最短距离最短。
- 在找到最短增广路径后,计算路径上的最小剩余容量。最小剩余容量是指路径上所有边的剩余容量的最小值。
- 通过更新路径上的边的流量来增加流量,即在正向边上增加流量,或在反向边上减少流量。
- 更新路径上的边的剩余容量,即减少正向边的剩余容量,增加反向边的剩余容量。
- 当不存在从源节点到汇节点的增广路径时,算法终止。此时,得到的流就是最大流。
Edmonds-Karp算法通过使用广度优先搜索来选择最短增广路径,相比于Ford-Fulkerson算法的深度优先搜索,它能够更快地找到增广路径。这是因为广度优先搜索以层次化的方式逐层遍历网络,从而找到最短距离的路径。这种选择最短增广路径的策略确保了算法的收敛性和终止性。
总结来说,Edmonds-Karp算法是一种基于广度优先搜索的改进Ford-Fulkerson算法,用于求解网络最大流问题。它通过选择最短增广路径来提高算法的效率和收敛速度。
从图中可以看出,这个时间复杂度比Ford-Fulkerson算法要好的多,因为它不依赖于网络流的大小。Edmonds和Karp两个人更好的贡献是证明了更好的时间复杂度,下面会简单分析一下Edmonds-Karp算法的时间复杂度。
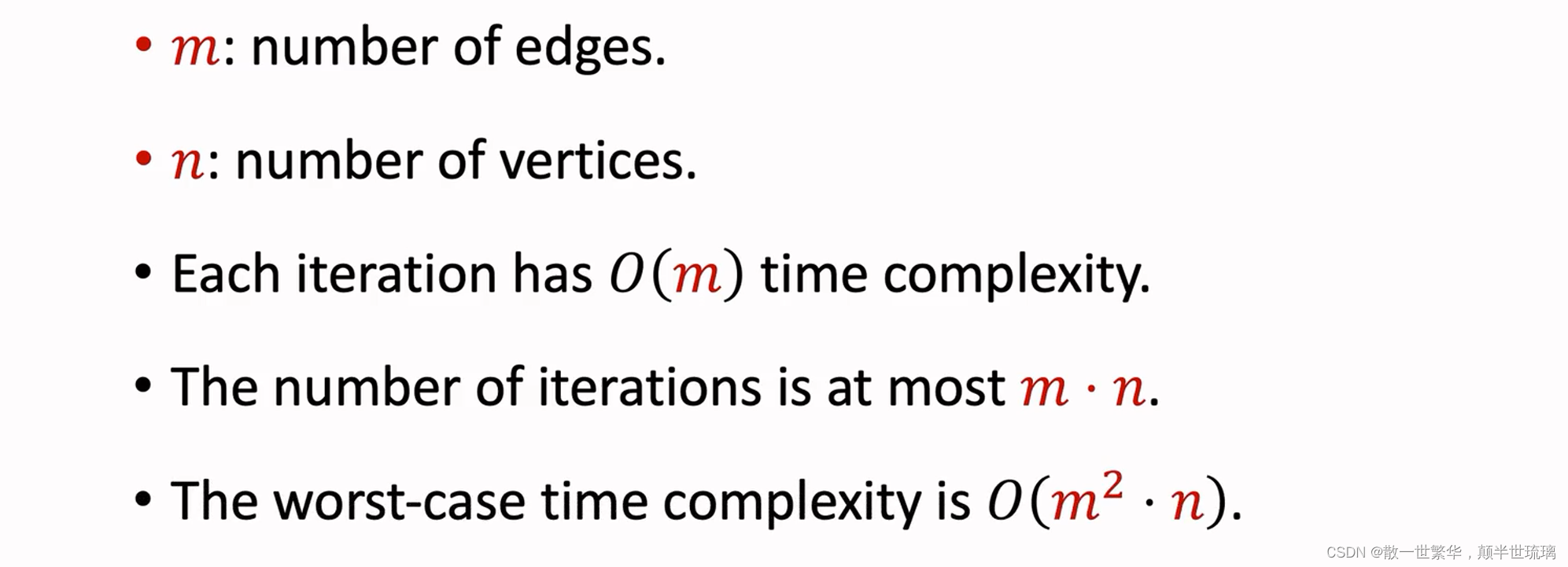
主要意思就是:假设residual graph有m条边,n个点,算法的每一轮循环都要在residual graph中寻找无权的最短路,所以需要O(m)的时间复杂度,原因是,如果原图中有m条边,那么residual graph中最多有m条反向边,所以residual graph一共有不超过2m条边,如果一个无权图有2m条边,那么寻找最短路就需要O(m)的时间。此外,Edmonds和Karp两个人证明了算法最多循环mn轮,即,算法每一轮需要O(m)的时间,最多循环mn轮,所以最坏时间复杂度是 O ( m 2 n ) O(m^2n) O(m2n),这个时间复杂度与最大流无关,最大流可以是几百几千万,都不会影响时间复杂度的大小。
5.Dinic’s Algorithm
Dinic’s Algorithm它是寻找网络最大流的算法,它的时间复杂度比Edmonds-Karp Algorithm更低,先简单比较一下两种算法的时间复杂度,具体如下所示:
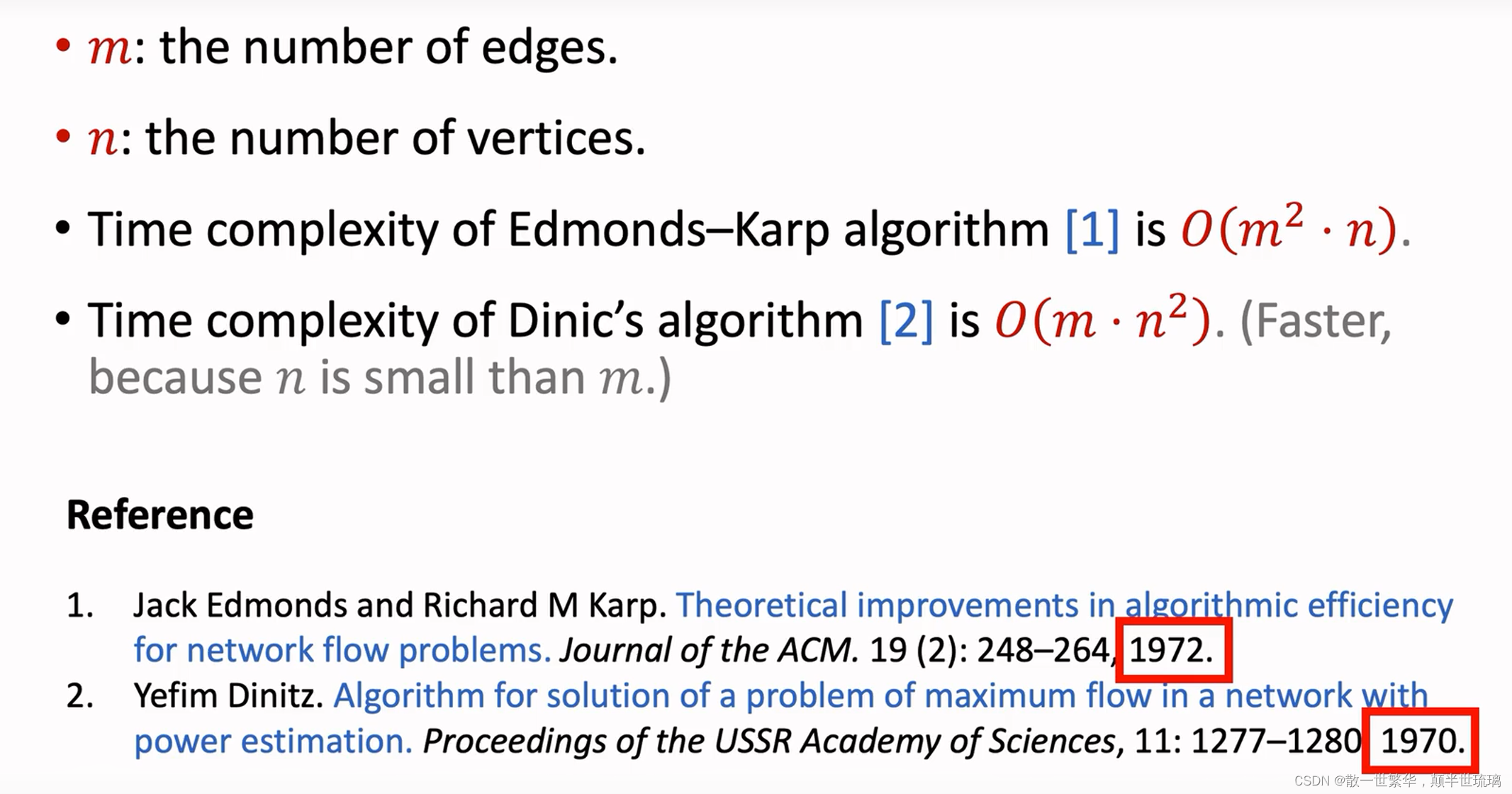
从图中可以看出,若边的数量为m,点的数量为n,则Edmonds-Karp Algorithm的时间复杂度为O( m 2 n m^2n m2n),而Dinic’s Algorithm的时间复杂度为O( m n 2 mn^2 mn2),但是一般边的个数m会远大于点的个数n,因此Dinic’s Algorithm的时间复杂度会更低。
Dinic’s Algorithm要用到Blocking Flow(阻塞流),阻塞流意思是拥有这些流量,就不能增加更多流量,也就是这些流量阻塞了管道。
最大流一定是阻塞流,但是阻塞流未必是最大流。 前面介绍的简单算法一定能找到阻塞流,但是未必能找到最大流。
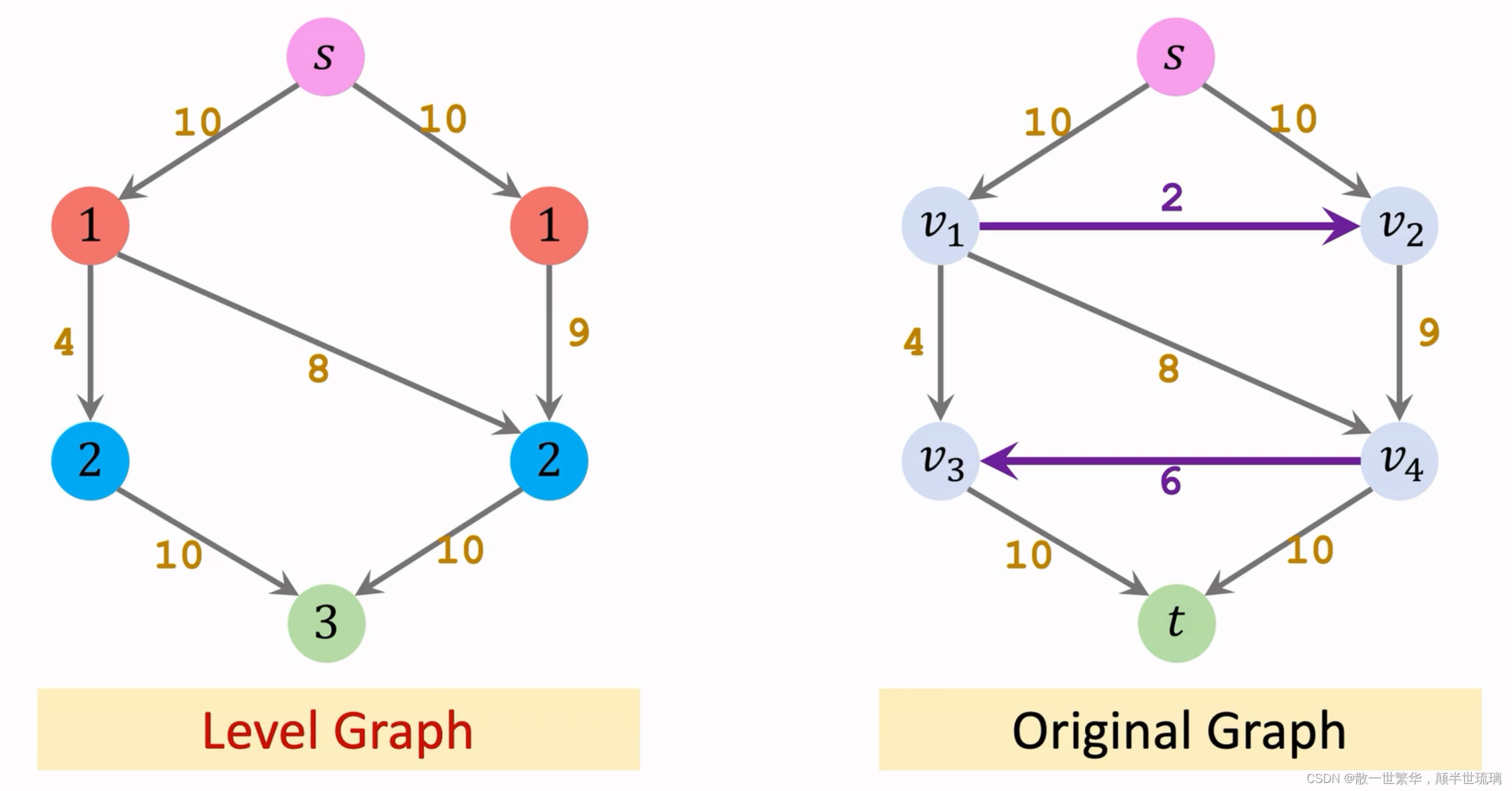
此外,Dinic’s Algorithm还会用到Level Graph ,下面简单介绍一下Level Graph。
给定右边的原图,下面一步步构造Level Graph,从起点S开始,走一步能达到 v 1 , v 2 v_{1},v_{2} v1,v2这两个节点,把 v 1 , v 2 v_{1},v_{2} v1,v2加入左边的Level Graph,同时把 v 1 , v 2 v_{1},v_{2} v1,v2记作第一层,意思是从起点出发走一步能达到,保留从起点S到第一层的边。再看右边的原图,从第一层的 v 1 , v 2 v_{1},v_{2} v1,v2出发,走一步能达到 v 3 , v 4 v_{3},v_{4} v3,v4两个节点,把 v 3 , v 4 v_{3},v_{4} v3,v4加入左边的Level Graph,同时把 v 3 , v 4 v_{3},v_{4} v3,v4记作第二层,意思是从起点出发走两步能达到,保留从第一层到第二层的三条边。再看右边的原图,从第二层的节点 v 3 , v 4 v_{3},v_{4} v3,v4出发。走一步可以达到终点t,把终点t加入左边的Level Graph,同时把终点t记作第三层,意思是从起点出发走三步能达到,并保留第二层到第三层的边,Level Graph的边指的是从上一层到下一层。,下图右侧两条紫色的边分别是从第一层到第一层,第二层到第二层,因此不能加入Level Graph中。
掌握了与预备知识,那么下面进入正题!
Dinic’s算法是一种高效的解决最大流问题的算法,它基于增广路径和分层图的概念。以下是Dinic’s算法的步骤总结:
- 构建初始残余网络(residual graph):将所有边的流量初始化为0,并根据网络中的边构建初始的残余网络(residual graph)。
- 构建分层图(Level Graph):使用广度优先搜索(BFS)构建分层图。分层图是在残余网络中,将每个节点按照其到源节点的最短距离分层的图。
- 寻找增广路径:在分层图中,从源节点到汇节点寻找增广路径。增广路径是指路径上所有边的剩余容量大于0。
- 更新阻塞流和反向边:如果找到增广路径,则将对应residual graph路径上的最小剩余容量作为阻塞流,增加流量,并更新路径上的边的剩余容量。同时,对于路径上的每条边,增加反向边的剩余容量。
- 重复迭代:重复步骤2到步骤4,直到无法再找到增广路径为止。每次迭代中,分层图(Level Graph)会更新,从而更好地指导下一次增广路径的寻找。
- 终止条件:当无法再找到增广路径时,算法终止。此时,得到的流就是最大流。
Dinic’s算法通过构建分层图(Level Graph)来指导增广路径的寻找,从而减少了无效的搜索,提高了算法的效率。在寻找增广路径时,除了更新阻塞流和路径上的边的剩余容量外,还需要增加反向边的剩余容量,以确保反向流的正确性。

7.Max-Flow Min-Cut Theorem
最大流最小割定理(Max-Flow Min-Cut Theorem)说明了最大流问题和最小割问题的等价性!
对于一个网络流问题,最大流的流量等于最小割的容量,也就是说,你求出了最大流问题,就相当于求出了最小割问题。这个定理是Ford和Fulkerson两个人在1962年提出来的。
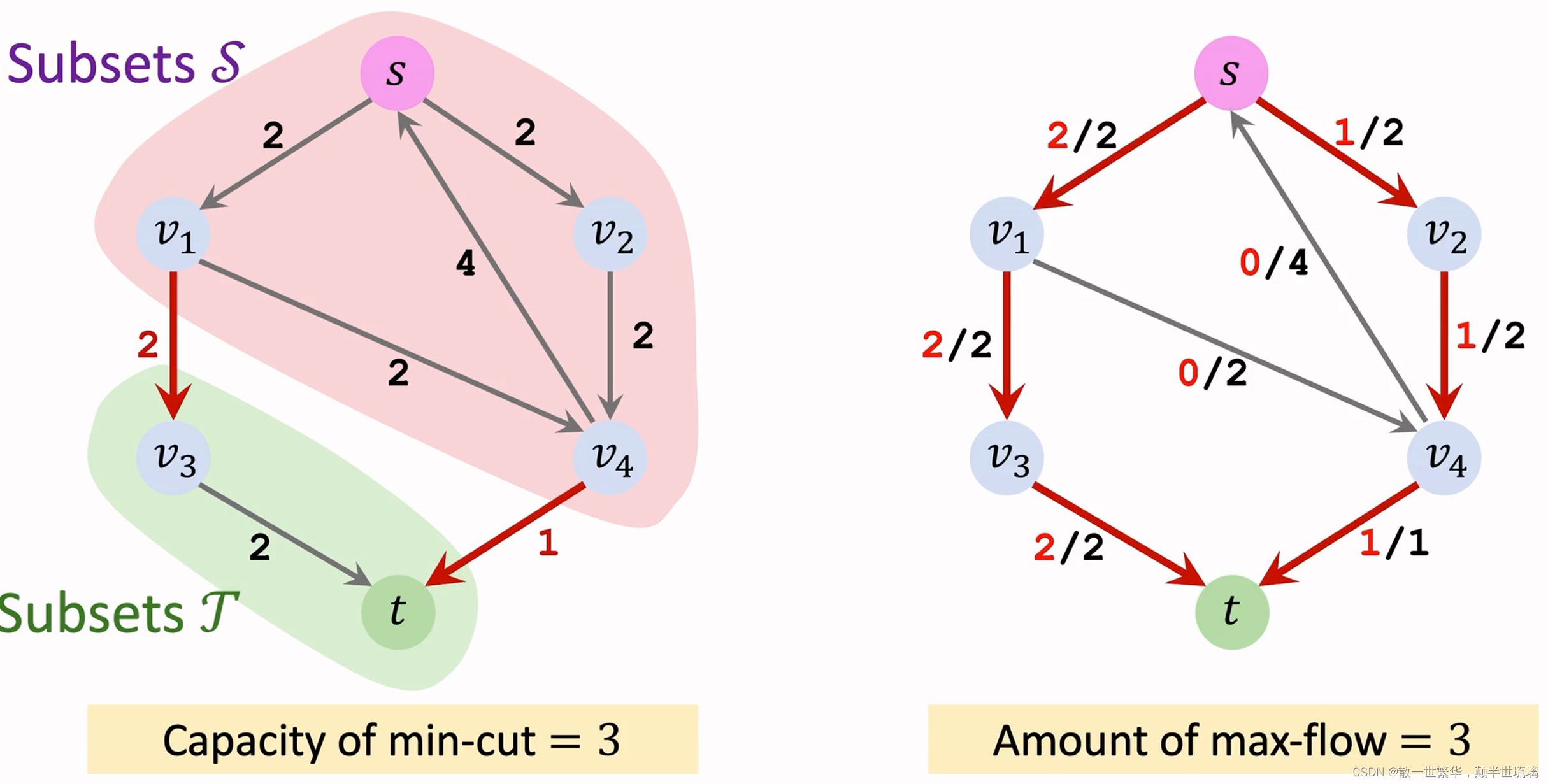
接下来介绍一种寻找最小割问题!
这种方法把最小割问题等价转换为最大流问题,只要我们找到最大流,我们就能找到最小割。
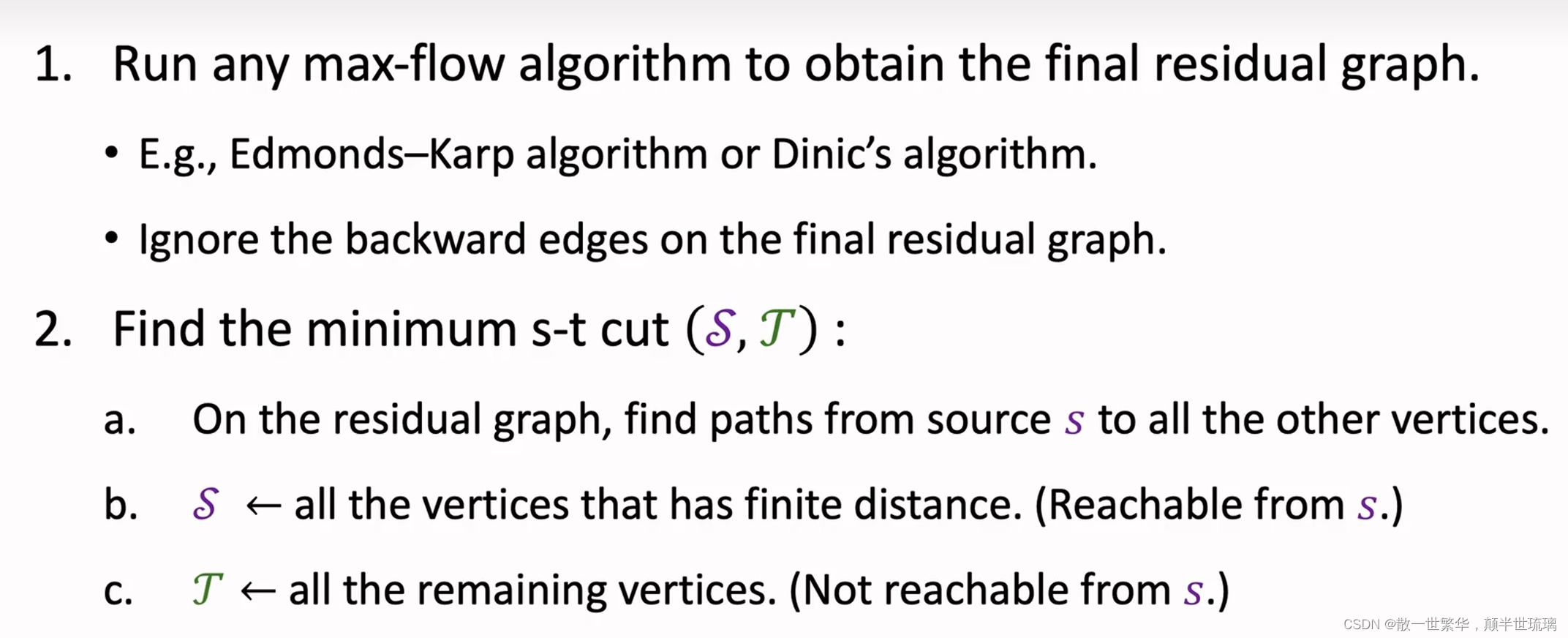
简单来说就是:
1.使用Edmonds-Karp Algorithm找到最终的residual graph;
2.然后在最终的residual graph去掉所有的反向边;
3.在去掉所有反向边的residual graph后,从该图中找到从s出发能到达的所有顶点,让其作为集合的一部分,剩下的作为集合的剩余部分;
4.最后根据划分好的两部分集合找到最小割。