LIO标定
网上开源的标定包,用的比较多的是浙江大学开源的lidar_IMU_calib以及瑞士苏黎世联邦理工大学–自动驾驶实验室开源的lidar-align,网上说后边的这种方法,因为是纯IMU积分,无法得到准确的Odom数据,所以无法进行纯imu与lidar的标定。我还没具体看代码,后续看了再做更改。
lidar_IMU_calib
安装过程可以参考这里
首先需要明白的是标定的是什么?
参考这里给出答案
1.Lidar的外参
一般厂商都做了标定,所以可以暂且不管
2.IMU内参
根据IMU的测量模型来说:
a m = R G I ( a − g ) + b a ( t ) + n a \mathrm{a}_{\mathrm{m}}=\mathrm{R}_{\mathrm{G}}^{\mathrm{I}}(\mathrm{a}-\mathrm{g})+\mathrm{b}_{\mathrm{a}}(\mathrm{t})+\mathrm{n}_{\mathrm{a}} am=RGI(a−g)+ba(t)+na
w m = w + b g ( t ) + n g \mathrm{w}_{\mathrm{m}}=\mathrm{w}+\mathrm{b}_{\mathrm{g}}(\mathrm{t})+\mathrm{n}_{\mathrm{g}} wm=w+bg(t)+ng
等号左侧是测量值,a,w是实际的真值,g是重力加速度(可以看出IMU在z轴正方时会有一个+g的输出,而且是归一化的,表示“几个g”, b a b_a ba, b g b_g bg是随机游走噪声,随时间变化,而 n g , n a n_g,n_a ng,na是测量高斯白噪声。在IMU启动后,需要确定到世界系/大地系/地球系的旋转矩阵R,并需要实时估计两个bias(偏差)。
3. Lidar与IMU之间的变换
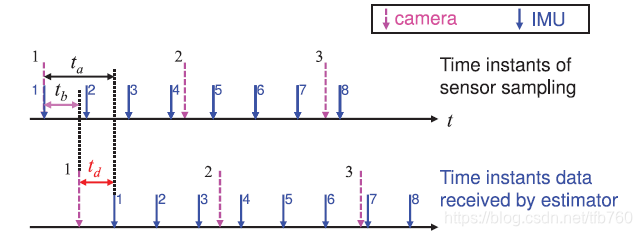
Lidar与IMU之间的变换,包括两部分:6DoF的刚体变换,与传感器延迟的时间差。首先说这个时间差,由于传感器在测量(采样)时并不是同步的,同时由于传感器到系统有一个延迟,两者信号之间具有时差,这影响了测量值插值的精度。如图, t a , t b t_a,t_b ta,tb分别是IMU和camera的延迟,延迟后相差一个 t d t_d td,所以对于采样到的camera需要加上这个 t d t_d td才能得到在IMU时间系统中采样的时刻(一般论文都将IMU时间作为系统参考时间)。
刚体变换,即计算Lidar到IMU的刚体变换,一般论文中为了方便,多将IMU系作为机器人机体系,而将Lidar的点云数据变换到IMU系,因此需要得到从Lidar到IMU的刚体变换。即参数 R , t R,t R,t
由于本人使用的是RS-16雷达,而这个代码是只支持VLP-16雷达,因此需要自己做一些调整。
网上有一个修改成RS-32的,参考这里
编译过程以及代码理解可以看一下这里
标定得到的数据可以用来跑一些LIO,例如lego-loam,加入IMU数据的程序可以参考这里 跑lego-loam时遇到的问题可以参考这里
注意:rosbag play --clock *.bag
lidar_align
lidar_align据说不适用于纯IMU与Lidar进行标定!纯IMU进行积分,无法得到准确的Odom数据。
lidar_align编译以及遇到的一些报错可以参考这里和Lidar与Odom外参标定:lidar_align代码学习
ubuntu16.04 lio_sam算法 录制自己的数据集构建地图
代码讲解可以参考这里
kitti数据集的使用
关于将bin文件转换成rosbag的方法,有对应代码,参考这里,对应的README有详细的步骤
也有方法直接将bin文件通过一个程序以pointcloud的形式发布话题,就不用生成专门的rosbag包占用空间了,这个作者就是在上面的这个程序的基础上修改的,具体参考这里
关于kitti数据集的介绍以及讲解,这里、这里、这里都有,但是我觉得没卵用,也可以看官网,我觉得还是官网写的比较清楚,并且也给出了几个工具供使用,关于数据集知道个差不多就可以了。具体的使用,这里给出了例子。
开源数据集
1.kitti数据集(RGB+Lidar+GPS+IMU)(场景:市区、乡村、高速公路)
2.ASL EuRoC数据集(双目RGB+IMU)(场景:微型飞行器在两个不同的房间、大型工业环境)
3.TUM VI banchmark(fisheye(鱼眼)+imu)(应该是室内)
参考:SLAM数据集
SLAM相关数据集调研
SLAM学习–开源测试数据集合
evo工具的使用
evo是一个测评工具,它可以根据时间戳将轨迹进行对齐,同时可以将不同尺度的轨迹按照你指定的标准轨迹进行拉伸对齐,并可以算出均方差等评定参数,用于测评slam算法性能。
evo的安装推荐使用快捷安装
pip install evo --upgrade --no-binary evo
本人尝试过使用源码安装,然后被劝退了,可能是自己太菜了,不是说python版本不够就是库rosbags版本不够,经过将近一天的折腾始终没有拿下,综合考虑时间问题选择了快捷安装,安装方式可以参考测评工具evo安装与使用以及遇到的问题及解决方法和evo使用,还有evo安装与使用
本人使用快捷安装时也遇到了一些问题,好像是没有安装什么库,然后自行百度一下就给解决了。ModuleNotFoundError: No module named ‘_tkinter‘解决方案
这些主要是为了学习lego-loam时用到的,evo的使用也可以参考如何使用evo工具评估LeGO-LOAM跑KITTI数据集的结果,以及可能要使用到的PCL小工具二:使用kitti的GT(ground truth)建立激光点云地图
ssh 的使用
网上找了一大堆VSCode使用SSH的例程,都没有成功,总是连接不上,直到找到了这个例程VSCode通过SSH连接Ubuntu的环境搭建流程能够解决ubuntu上的vscode连接树莓派上的ubuntu,但是依旧不能解决我windows上的vscode连接树莓派上的ubuntu问题。同时在ubuntu连接ubuntu时遇到的问题就是:输入了三次树莓派的密码,每次输入完密码给出的信息是,Permission denied,三次输入完后连接不上,直到参考VSCode ssh-remote插件使用密码不正确解决掉了。如果没能解决,看vscode ssh远程输入密码之后无反应,一直提示输入密码应该能解决吧。
2022/9/25更新
最近觉得多装一个xshell软件也不错用来控制ssh,具体方式在这:Xshell 通过ssh 连接主机
2023/7/11更新
自己使用树莓派时,需要先将windows的C盘下面的id_rsa.pub复制到树莓派下面的.ssh文件夹中的 应该是id_rsa
如果第一次连接时出现XHR fail 那是因为需要联网 vscode 会自动下载一个东西给树莓派 这样才能连接上,不联网就下载不了,所以会报这个错