最近需要复现一下论文中的电机仿真环节,于是又在网上找寻了各种教程。这篇文章总结了我学习直流电机仿真的一些记录和一些知识点文章等。
由于本人电力电子技术等知识的欠缺,故这篇文章适用于为理解或者搭建简单的电机的simulink仿真系统的友友。希望能为各位提供一点帮助!
VM调速系统

以上为直流电机闭环调速系统的Simulink仿真模型,使用的方法为VM调速(晶闸管调速)
什么是晶闸管,简述晶闸管的工作原理 - 知乎 (zhihu.com)
(17条消息) 电力电子技术(15)——晶闸管直流电动机调速&相控电路的驱动控制_晶闸管触发角_欲读万卷书,不入愚昧途的博客-CSDN博客
求解器使用ode45,算法设置为离散。(powergui)
电源采用三相电源,右接入三相检测端:

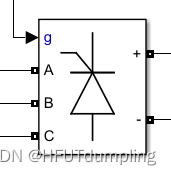
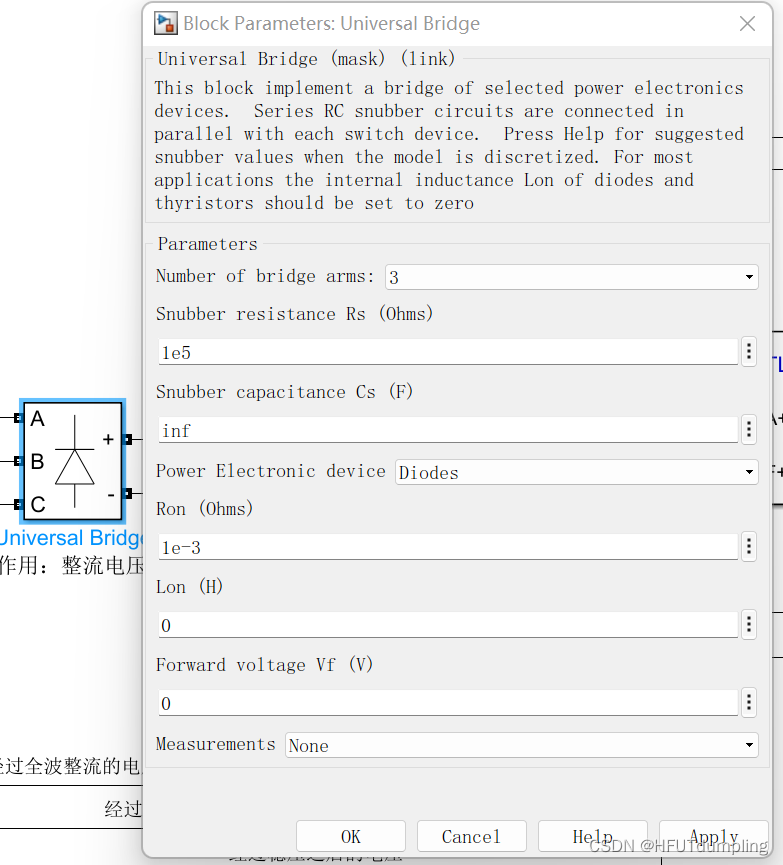
右接入三路电桥(电桥:电桥 - 搜狗百科 (sogou.com)),使用晶闸管,选定默认参数:
右边输出即为直流电。右接入电抗。作用:平波(平波电抗器_百度百科 (baidu.com)):

引入DC电机 ,并调整相关参数;引入可控直流源;引入负载:

至此,电路部分搭建完毕,接下来搭建控制端。
控制端需要锁相环(PLL)、脉冲发生器。
该处锁相环可用于该锁相环(PLL)系统可用于同步一组变频,三相正弦信号。用于检测初始相位、位置等。锁相环的freq口不需要用,则连接终端口(Terminator)即可。
脉冲发生器:脉冲宽度设置为5。

如过上图alpha端口连接导通角(constant模块即可),取值为(0~90) ,此时,可通过调整导通角和负载来改变电机转速,开环控制模型已搭建完成。
引入负反馈,使整个系统闭环。控制方式为PI。
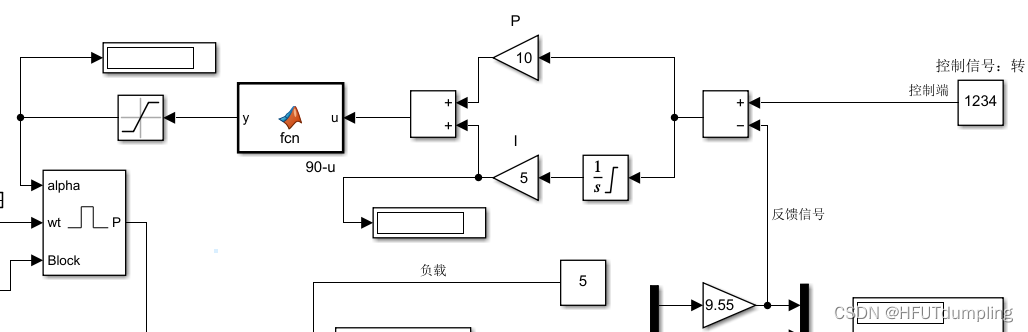
其中,PID控制的搭建方法可参考:(17条消息) 【学习记录】PID原理学习以及在matlab/simulink中实现PID调参_HFUTdumpling的博客-CSDN博客
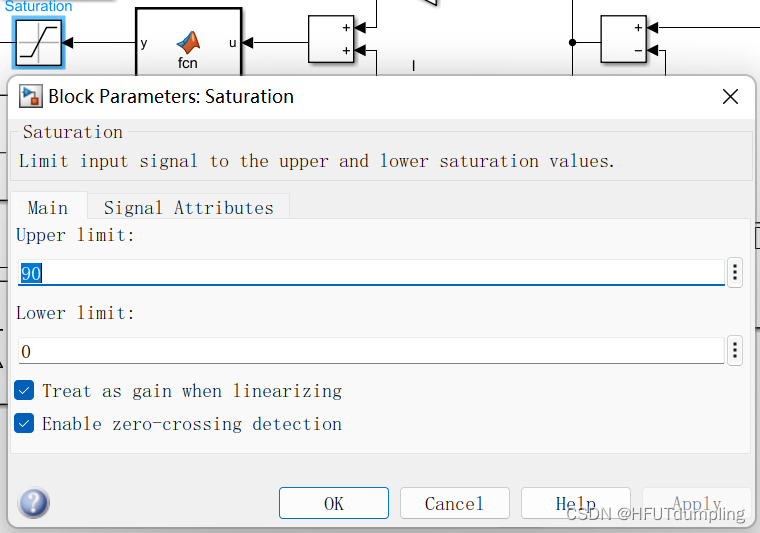
fcn中输出的信号可能会超限,因此需要加入保护环节Saturation来限定输出,上限为90,下限为0(导通角)。
PID控制器中,I环节中建议不要直接引用intergrator模块,因为可能会超调太大导致发散,故保险起见采用饱和积分环节:
最后,调节P、I数值,即可完成一个净差为0 的直流电机闭环调速系统。
PWM调速系统

以上为笔者搭建的直流电机PWM闭环调速系统。
PWM是如何调节直流电机转速的?电机正反转的原理又是怎样的? - 知乎 (zhihu.com)
整个系统的电机端、电源端模块与前文VM调速系统使用的类似,故此处不再赘述。
在PWM调速中,不需要对整流桥进行控制,故采用全波整流即可(什么是全波整流电路?如何构建全波整流电路?这一文帮你总结 - 知乎 (zhihu.com)):
将Universal Bridge模块中的晶闸管(Thyristors)改为二极管(Diodes)即可
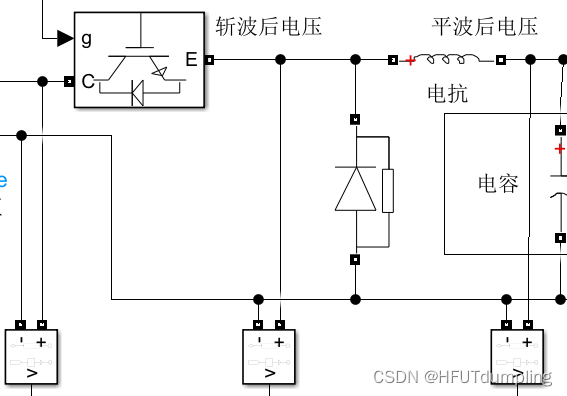
在直流电机这部分引入Buck电路:BUCK电路_百度百科 (baidu.com)
首先引入IGBT(IGBT_百度百科 (baidu.com)),此处是作为理想开关;
引入二极管,增加电抗、电容。
此处分别是对电压进行斩波、平波和稳压。
控制端:直接引入PWM发生器(PWM Generator (DC-DC))
占空越大,转速越高,占空比越小,转速越低。
接入PI控制环节,调节P、I数值后即完成直流电机PWM调速系统。可通过调节目标转速,来控制电机的实际转速。
使用555定时器发生PWM波

总结
作为非电气专业的同学,接触类似电力电子仿真的东西属实比较困难。在接下来的学习中,我还需要多多学习,多多补充基础知识!最后感谢b站微光老师的教程视频:幽影微光的个人空间_哔哩哔哩_bilibili
本文参考:
1、【教程向】simulink 05 直流电机VM调速系统_哔哩哔哩_bilibili
2、【教程向】simulink 07 直流电机PWM开环调速系统_哔哩哔哩_bilibili