一,电机驱动芯片:L298N简介
L298N 是一种双H桥电机驱动芯片,其中每个H桥可以提供2A的电流,功率部分的供电电压范围是2.5-48v,逻辑部分5v供电,接受5vTTL电平。一般情况下,功率部分的电压应大于6V否则芯片可能不能正常工作。
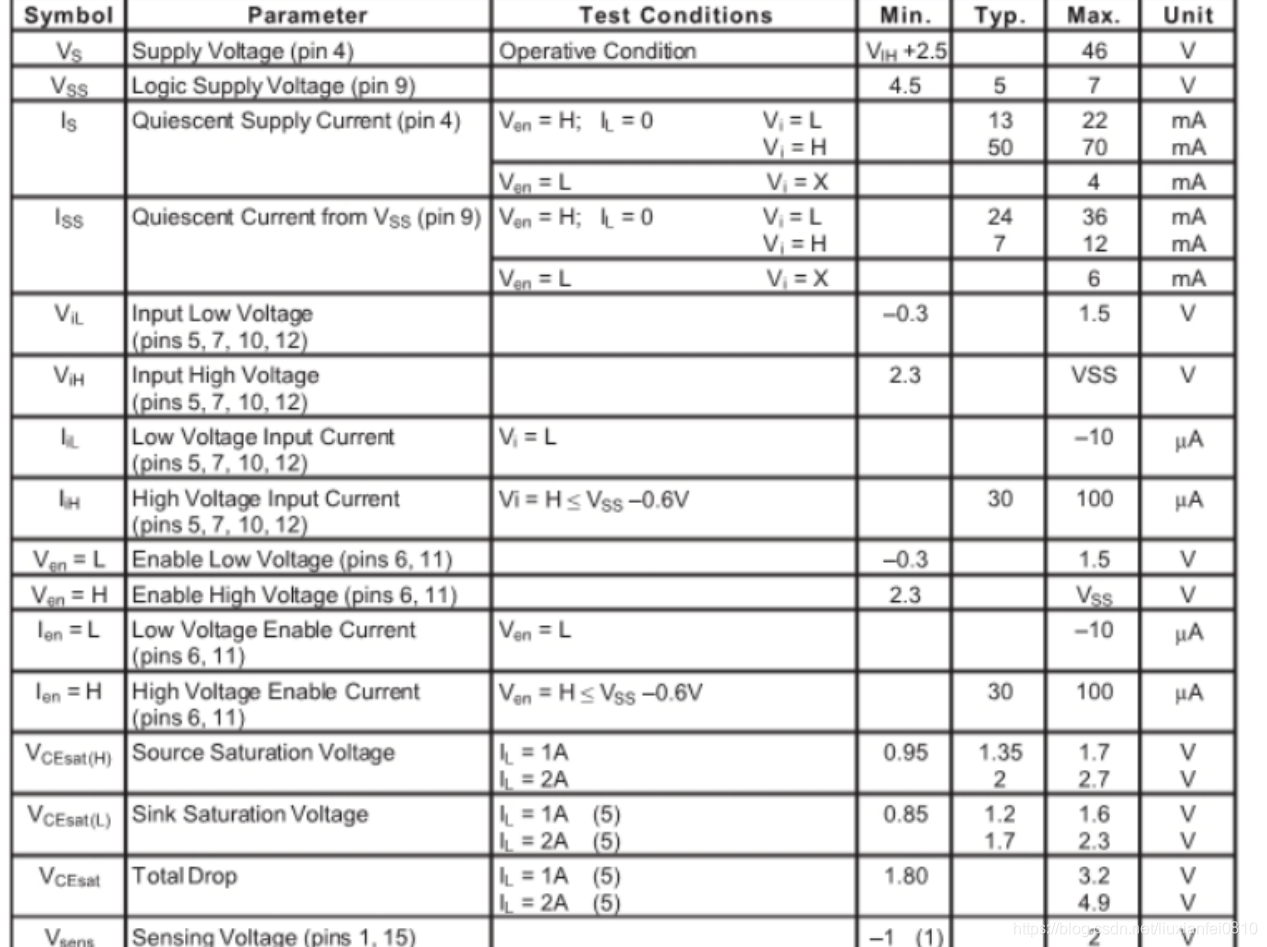
基本参数:

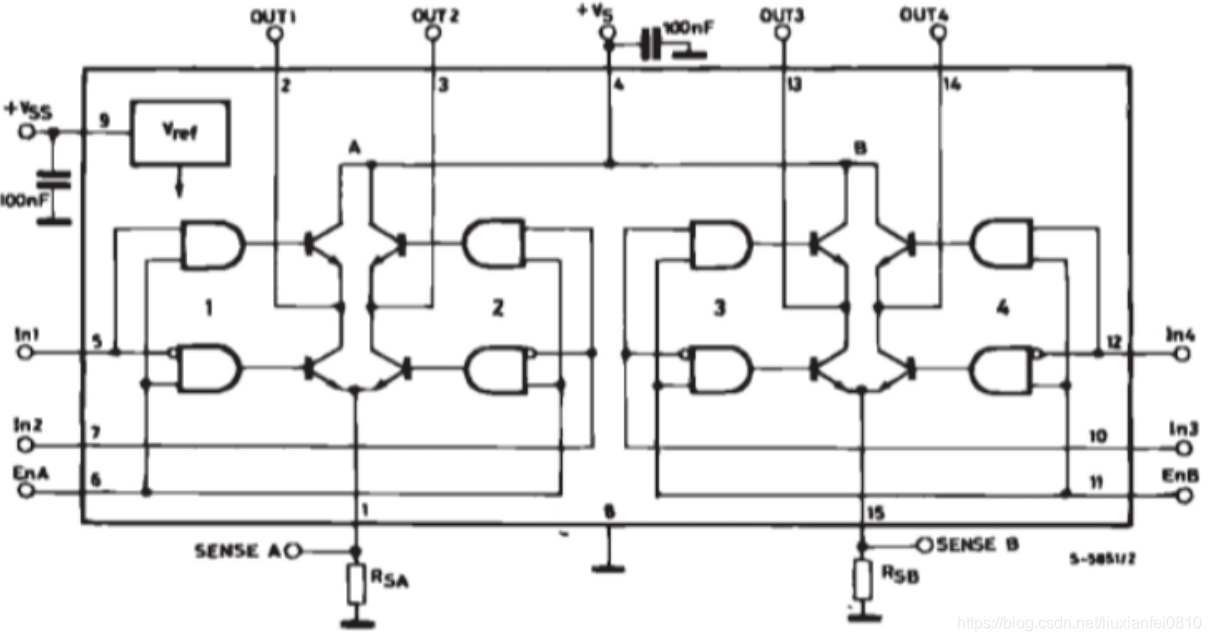
内部结构:
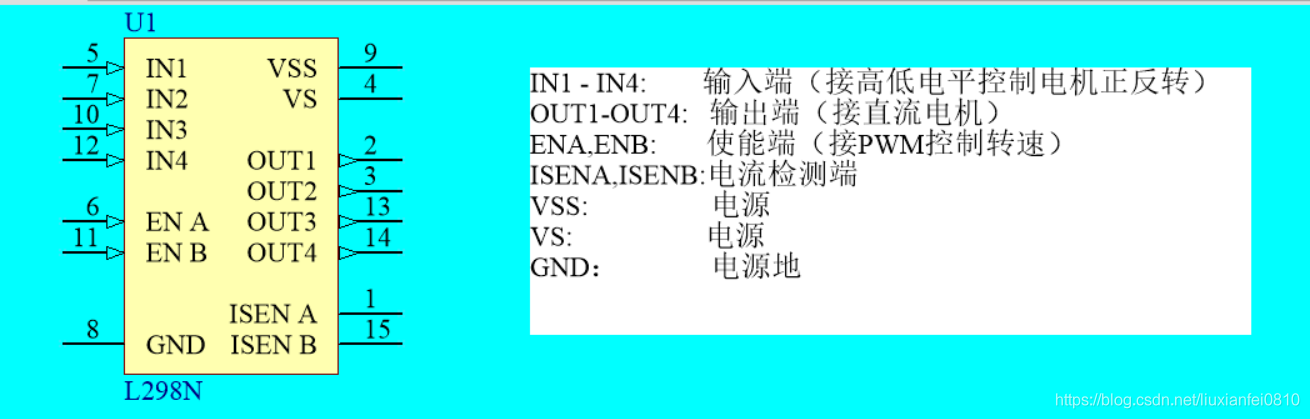
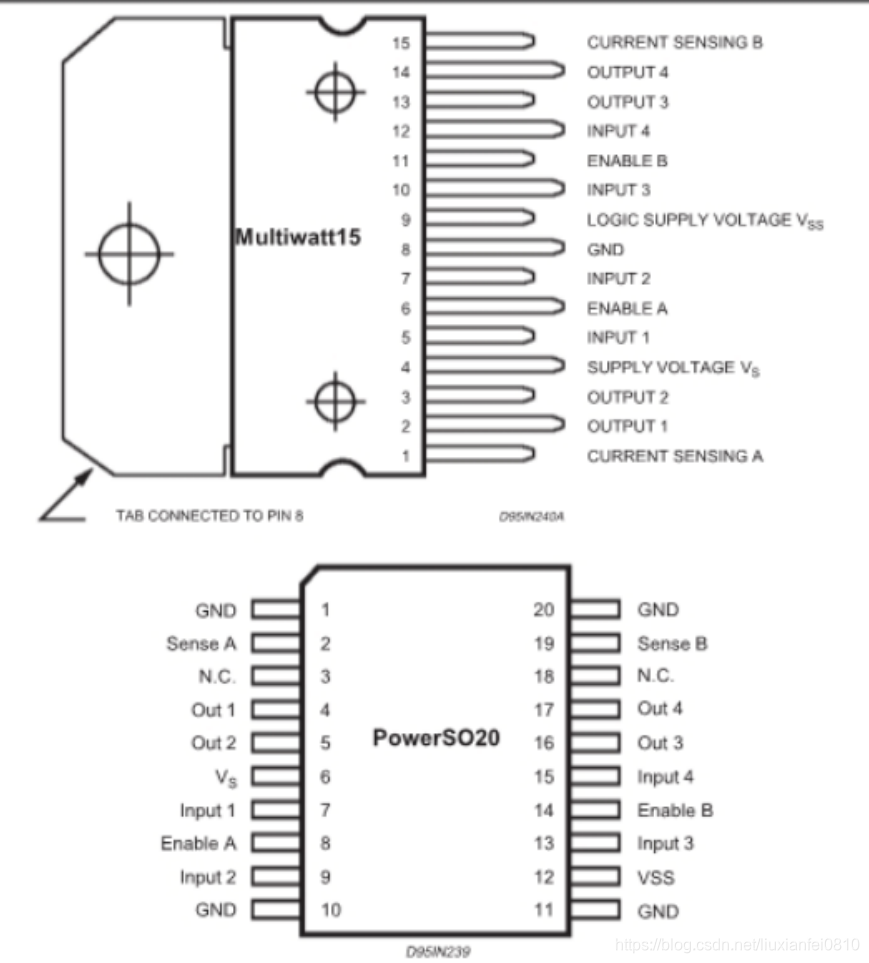
二,L298N引脚图:
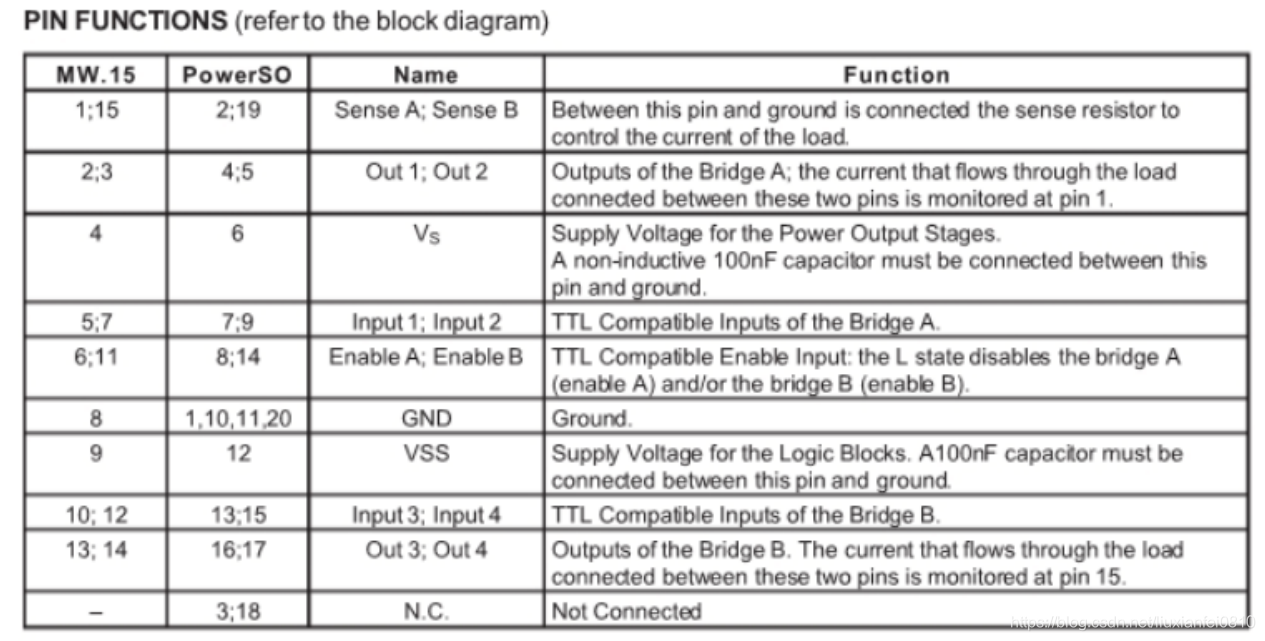
详细引脚说明如下:(摘自官方手册)
三:L98N "真值表"
ENA ENB IN1 IN2 IN3 IN4 OUT1 OUT2 OUT3 OUT4 电机状态
0 0 X.......
0 1 X X 0 0 X X 0 0 停止
0 1 X X 0 1 X X 0 1 反转
0 1 X X 1 0 X X 1 0 正转
0 1 X X 1 1 X X 1 1 刹停
1 0 与上类似
四,测速原理:编码器
编码器(encoder)是将信号(如比特流)或数据进行编制、转换为可用以通讯、传输和存储的信号形式的设备。编码器把角位移或直线位移转换成电信号,前者称为码盘,后者称为码尺。按照读出方式编码器可以分为接触式和非接触式两种;按照工作原理编码器可分为增量式和绝对式两类。增量式编码器是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。绝对式编码器的每一个位置对应一个确定的数字码,因此它的示值只与测量的起始和终止位置有关,而与测量的中间过程无关。
五,程序源码:
#include "reg51.h"
#define uchar unsigned char
#define uint unsigned int
#define TH0_VALUE 0xF9
#define TL0_VALUE 0x0F
#define T1_VALUE 0XC0
#define DisplayPORTDAT P0
#define DisplayPORTSEL P2
#define COUNTVALUE 1000
#define INT0 0
#define TIM0 1
#define TIM1 3
uchar code SegmentCode[]={0x3F, 0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F};
uchar code BitCode[] = {0X7F,0XBF,0XDF,0XEF,0XF7,0XFB,0XFD,0XFE};
sbit L298NEN=P1^0;
sbit MotorSpeedADD=P1^1;
sbit MotorSpeedMinus=P1^2;
sbit MotorForward=P1^3;
sbit MotorBackward=P1^4;
sbit MotorStop=P1^5;
sbit L298NIN1=P1^6;
sbit L298NIN2=P1^7;
typedef struct _HANDLER
{
struct PID
{
float MotorSpeedSet;
float MotorSpeedAct;
float Kp;
float T;
float Ti;
float Td;
float Ek;
float Kd;
float Ki;
float Eklast;
float Eklastlast;
float SEK;
float OUT0;
float OUT;
uint Calc_Time;
uint PWM;
}pid;
uint MotorSpeedSetDis;
uint MotorSpeedActDis;
uint counter;
uint PulseIn;
uchar disBit;
uchar DisplayDataBuffer[8];
}Handler;
Handler handler;
void delay_ms(uint x)
{
uint i,j;
for(i=0;i<x;i++)
for(j=110;j>0;j--);
}
void Func0(void)
{
TMOD=0X21;
TH0=TH0_VALUE;
TL0=TL0_VALUE;
TH1=T1_VALUE;
TL1=T1_VALUE;
ET1=1;
ET0=1;
IT0=1;
EA=1;
L298NIN1 = 1;
L298NIN2 = 0;
handler.counter=0;
handler.PulseIn=0;
handler.disBit=0;
handler.DisplayDataBuffer[7]=0;
handler.pid.Kp=18.5;
handler.pid.MotorSpeedAct=0;
handler.pid.MotorSpeedSet=250;
handler.pid.Kd=1.55;
handler.pid.Ki=13;
handler.pid.OUT0=0;
handler.pid.Ek=0;
handler.pid.Eklast=0;
handler.pid.Eklastlast=0;
handler.pid.Calc_Time=0;
handler.pid.PWM=100;
//Some variables are unused
TR0=1;
TR1=1;
EX0=1;
}
void Func1(void)
{
float delEk;//Current deviation-last deviation
float Iout;//Integral output
float Pout;//Proportional output
float Dout;//Differential output
handler.pid.Ek=handler.pid.MotorSpeedSet-handler.pid.MotorSpeedAct;
delEk=handler.pid.Ek-handler.pid.Eklast;
Iout=handler.pid.Ki*handler.pid.Ek;
Dout=handler.pid.Kd*(handler.pid.Ek-2*handler.pid.Eklast+handler.pid.Eklastlast);
Pout=handler.pid.Kp*delEk;
handler.pid.OUT=(Pout+Iout+Dout)/50+handler.pid.OUT0;
if(handler.pid.OUT>COUNTVALUE)
{
handler.pid.OUT=COUNTVALUE;
}
else if(handler.pid.OUT<0)
{
handler.pid.OUT=0;
}
else ;
handler.pid.Eklastlast=handler.pid.Eklast;
handler.pid.Eklast=handler.pid.Ek;
handler.pid.OUT0=handler.pid.OUT;
handler.pid.PWM=(uint)handler.pid.OUT;
}
void Func2(void)
{
if(MotorSpeedADD==0)
{
delay_ms(30);
if(MotorSpeedADD==0)
{
handler.pid.MotorSpeedSet+=20;
if(handler.pid.MotorSpeedSet>COUNTVALUE-300)
{
handler.pid.MotorSpeedSet=COUNTVALUE-300;
}
}
}
if(MotorSpeedMinus==0)
{
delay_ms(30);
if(MotorSpeedMinus==0)
{
handler.pid.MotorSpeedSet-=20;
if(handler.pid.MotorSpeedSet<0)
handler.pid.MotorSpeedSet=0;
}
}
if(MotorForward==0)
{
delay_ms(30);
if(MotorForward==0)
{
L298NIN1 = 1;
L298NIN2 = 0;
while(MotorForward==0);
}
}
if(MotorBackward==0)
{
delay_ms(30);
if(MotorBackward==0)
{
L298NIN1 = 0;
L298NIN2 = 1;
while(MotorBackward==0);
}
}
if(MotorStop==0)
{
delay_ms(30);
if(MotorStop==0)
{
L298NIN1 = 1;
L298NIN2 = 1;
while(MotorStop==0);
}
}
}
void Func3(void)
{
if(handler.counter<handler.pid.PWM)
{
L298NEN=1;
}
else
{
L298NEN=0;
}
if(handler.counter>COUNTVALUE)
handler.counter=0;
}
void Func4(void)
{
handler.MotorSpeedSetDis=(uint)handler.pid.MotorSpeedSet;
handler.MotorSpeedActDis=(uint)handler.pid.MotorSpeedAct;
handler.DisplayDataBuffer[0]=handler.MotorSpeedSetDis/1000;
handler.DisplayDataBuffer[1]=handler.MotorSpeedSetDis % 1000/100;
handler.DisplayDataBuffer[2]=handler.MotorSpeedSetDis%100/10;
handler.DisplayDataBuffer[3]=handler.MotorSpeedSetDis%10;
handler.DisplayDataBuffer[4]=handler.MotorSpeedActDis/1000;
handler.DisplayDataBuffer[5]=handler.MotorSpeedActDis%1000/100;
handler.DisplayDataBuffer[6]=handler.MotorSpeedActDis%100/10;
handler.DisplayDataBuffer[7]=handler.MotorSpeedActDis%10;
}
void Int0_IRQ(void) interrupt INT0
{
handler.PulseIn++;
}
void(*fp[5])(void)={Func0,Func1,Func2,Func3,Func4};
void Timer0_IRQ() interrupt TIM0
{
TH0=TH0_VALUE;
TL0=TL0_VALUE;
handler.disBit++;
handler.pid.Calc_Time++;
if(handler.disBit>=8)
handler.disBit=0;
DisplayPORTSEL=0xff;
DisplayPORTDAT=SegmentCode[handler.DisplayDataBuffer[handler.disBit]];
switch(handler.disBit)
{
case 0:DisplayPORTSEL=BitCode[handler.disBit];break;
case 1:DisplayPORTSEL=BitCode[handler.disBit];break;
case 2:DisplayPORTSEL=BitCode[handler.disBit];break;
case 3:DisplayPORTSEL=BitCode[handler.disBit];break;
case 4:DisplayPORTSEL=BitCode[handler.disBit];break;
case 5:DisplayPORTSEL=BitCode[handler.disBit];break;
case 6:DisplayPORTSEL=BitCode[handler.disBit];break;
case 7:DisplayPORTSEL=BitCode[handler.disBit];break;
}
if(handler.pid.Calc_Time>50)
{
handler.pid.Calc_Time=0;
handler.pid.MotorSpeedAct=handler.PulseIn*10;
handler.PulseIn=0;
fp[1]();
}
}
void Timer1_IRQ(void)interrupt TIM1
{
handler.counter++;
}
int main()
{
fp[0]();
while(1)
{
fp[2]();
fp[3]();
fp[4]();
}
return 0;
}
仿真视频:
基于51单片机的直流电机闭环调速控制系统设计(PID算法)
