目录
一、理论基础
基于锁相环的直流电机转速控制系统实质就是一个锁相环,只不过电动机加上光电脉冲编码器的组合代替了压控振荡器。由于直流电动机的外施电压与电动机转速之间有良好的线性关系且光电脉冲编码器输出脉冲的频率又与转速严格成正比,因此可比拟为一个压控振荡器。此外,为了保证系统在每种初始条件下都能锁定,鉴相环节使用的是鉴频鉴相器(PFD),它不仅能比较参考信号和反馈信号的相位,而且能比较他们的频率,因此系统会稳定的运行.
系统的基本结构如下所示:
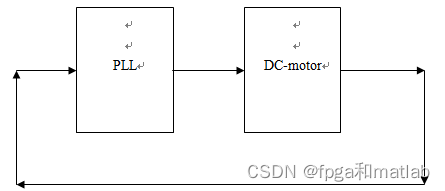
整个系统给的基本结构就是一个模拟PLL,一个是直流电机,我们通过直流电机的速度反馈来作为PLL的输入,然后通过PLL的输出来实现直流电机的速度控制。
二、部分MATLAB仿真
锁相环是一个相位负反馈控制系统,它主要由三部分组成,分别是鉴相鉴频器(PFD)、环路滤波器(LF)和电压控制器(VCO)。系统的基本结构如下所示:
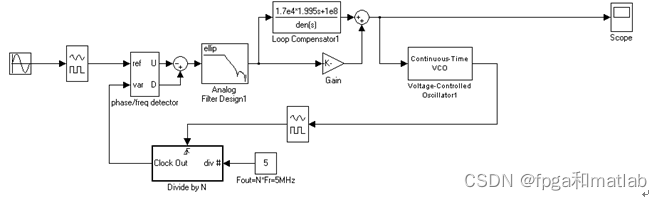
下面我们对这个模型进行简单的介绍。
鉴相器:
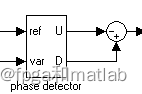
鉴相器的主要功能就是鉴别输入信号与输出信号的相位差,其作用就是误差提取功能。
在这里,鉴相器,我们主要通过D触发器来实现。

这个模块的主要功能就是起到异或的功能。只要两路信号有微小的差别,其误差就是计算出来。
环路滤波器:
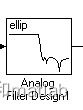
环路滤波器的主要功能就是滤除鉴相器的噪声部分以及高频分量。
在模拟PLL系统中,我们经常使用的是巴特窝斯模拟滤波器,其参数设置如下所示:
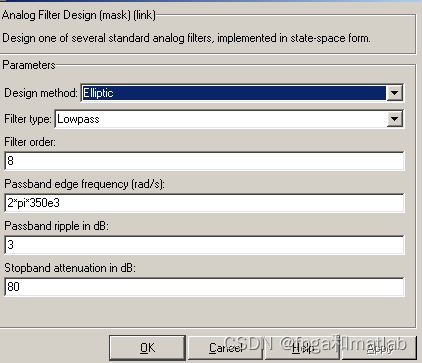
这里我们设置的是8阶滤波器。
VCO:
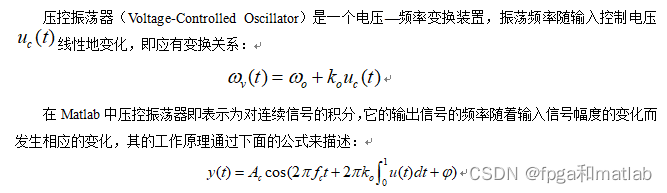
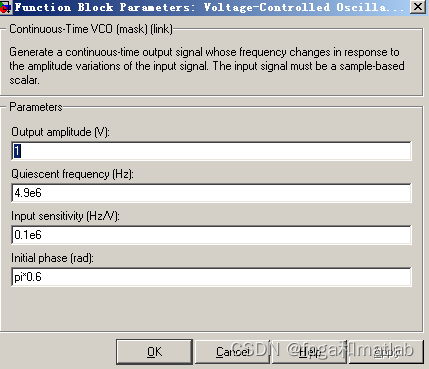
其参数设置界面如上图
通过以上介绍,我们完成了模拟锁相环的基本构架,其仿真结果如下所示:
从上的仿真结果可知,系统能够正常的工作。
通常,为了更能说明直流电机的本质问题,我们才用的是直流电机的数学模型来研究。一般,我们采用的直流电机的模型如下所示:
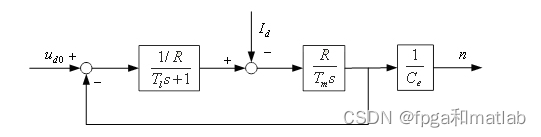
关于直流电机的介绍,您可以查看自己的相关教材。
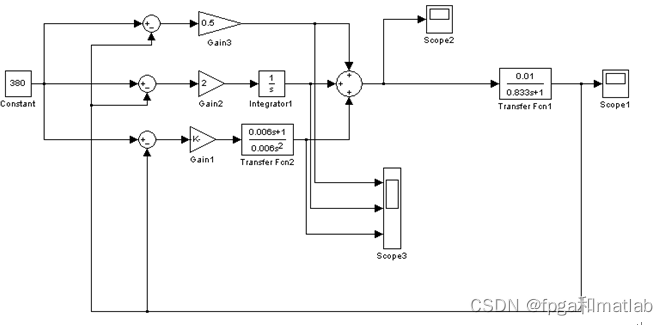
我们在simulink中建模,其模型如下所示:

这里通过对比,我们可以看到,
电压设置为380V,
R=0.6
Tl=0.008333
0~2.5s,电机空载,即Id=0;
2.5s~5s,电机满载,即Id=110A。
我们通过仿真,可以得到如下的结果:

从上图我们可以看到电机的几个转速指标:
读图知:
空载时转速n=1974.2r/min,
负载时转速n=1631r/min,
静差率s=17.384%
上面2.1我们介绍了锁相环的传统结构,但是研究发现,那种结构的锁相环并不适合电机的精确控制,因为电机的控制涉及到三个类别的误差信号的判断,速度误差信号、速度积分误差信号,速度重积分误差这样,才能做到直流电机速度的精确控制,然后将得到的三路误差信号相加作为误差信号并通过环路滤波输出。在电机控制系统中,锁相环的VCO结构就是我们直流电机,直流电机的输出就是作为系统的反馈信号。
其理论结构为:
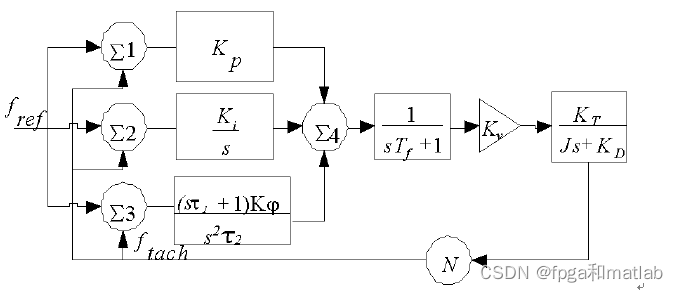
由此可见,三条支路的系数分别为:

通过调试,我们取系数如上图simulink中里提到的系数,其仿真结果如下所示。

而判断一个锁相环是否很好的在控制一个电机,就是判断其是否实现了无静差调速,即系统的静差率越小越好,此外还要解决超调量的问题。下面我们将开始设计基于PLL的直流电机控制器的simulink模型。
注意,前面的模拟锁相环是我们为了研究锁相环的需要而建立的模型,这里,在实际电机锁相环的应用中,这个模拟锁相环的基本结构需要修改,使其更加适合电机的工作模式,这点您要注意。
Simulink模型的基本结构如下所示:

当加入锁相环控制器的时候,我们还需要了解超调量这个概念,就是控制后,调整过程中最大的值与之后稳定的值的差/稳定值,这个也是一个重要的参数指标。
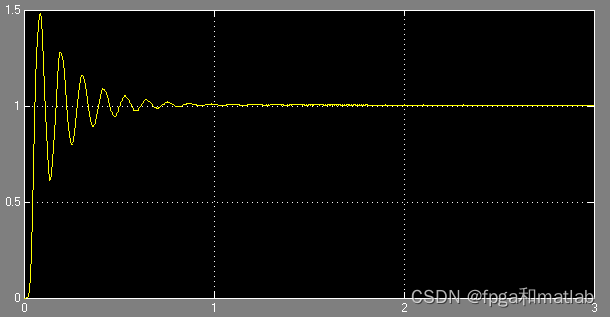
通过仿真,我们可以看到如下的结果:

这里我们需要调整这三个参数来获得较好的指标,即最小的静差率和最小的超调量。

这里其无静差率,超调量为0.88%。基本符合设计要求。
A15-2