图的基本概念
无向图
边是没有方向的,也就是双向的
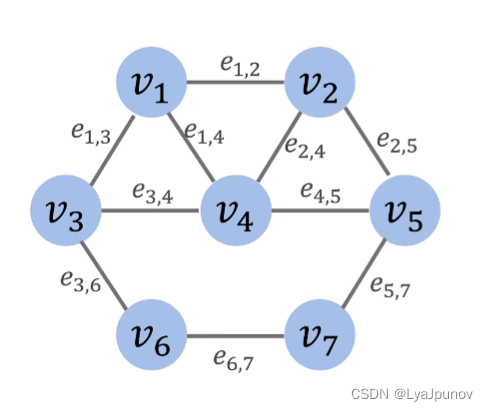
结点 V = { v 1 , v 2 , . . . , v 7 } \mathcal{V} = \{ v_1,v_2,...,v_7\} V={ v1,v2,...,v7}
边 ε = { e 1 , 2 , e 1 , 3 , . . . , e 6 , 7 } \varepsilon = \{e_{1,2},e_{1,3},...,e_{6,7}\} ε={ e1,2,e1,3,...,e6,7}
图 G = { V , ε } \mathcal{G} = \{ \mathcal{V},\varepsilon \} G={ V,ε}
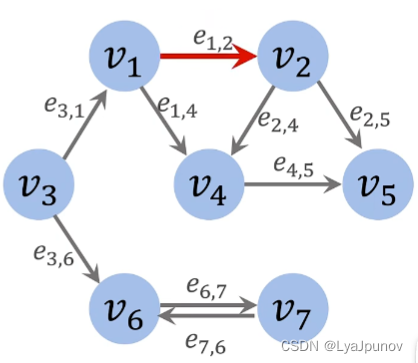
有向图
边是有方向的,也就是单向的
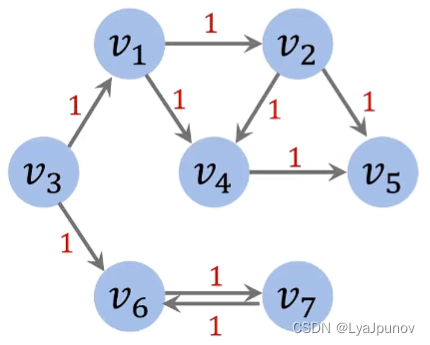
无权图
边没有权重,也可以理解为权重都是1
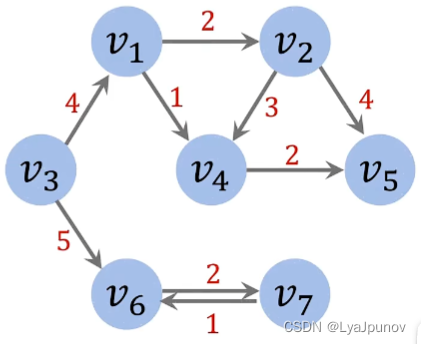
有权图
边有权重
图的数据结构
邻接矩阵与邻接表
无向无权图
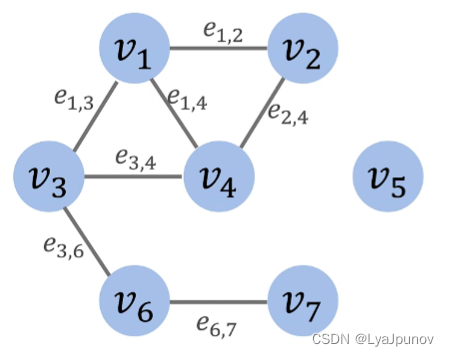
邻接表(Adjacency list)
表示结点与谁相连,
| vertex | Neighbors |
|---|---|
| 1 | 2,3,4 |
| 2 | 1,4 |
| 3 | 1,4,6 |
| 4 | 1,2,3 |
| 5 | empty |
| 6 | 3,7 |
| 7 | 6 |
领接矩阵(Adjacency matrix)
[ 0 1 1 1 0 0 0 1 0 0 1 0 0 0 1 0 0 1 0 1 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 1 0 0 0 0 0 1 0 ] \begin{bmatrix} 0 & 1& 1& 1& 0& 0& 0\\ 1 & 0& 0& 1& 0& 0& 0\\ 1 & 0& 0& 1& 0& 1& 0\\ 1 & 1& 1& 0& 0& 0& 0\\ 0 & 0& 0& 0& 0& 0& 0\\ 0 & 0& 1& 0& 0& 0& 1\\ 0 & 0& 0& 0& 0& 1& 0 \end{bmatrix} 0111000100100010010101110000000000000100010000010
邻接矩阵表示结点 i i i 和结点 j j j 之间的权重,如果是无权图,权重就是1。无向图的邻接矩阵都是对称的。因为边是双向的。
有向无权图
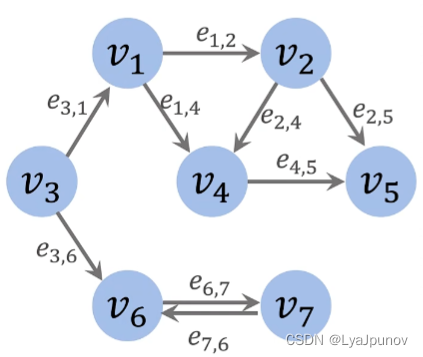
邻接表(Adjacency list)
表示结点与谁相连,
| vertex | Neighbors |
|---|---|
| 1 | 2,4 |
| 2 | 4,5 |
| 3 | 1,6 |
| 4 | 5 |
| 5 | empty |
| 6 | 7 |
| 7 | 6 |
领接矩阵(Adjacency matrix)
[ 0 1 0 1 0 0 0 0 0 0 1 1 0 0 1 0 0 0 0 1 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 1 0 ] \begin{bmatrix} 0 & 1& 0& 1& 0& 0& 0\\ 0 & 0& 0& 1& 1& 0& 0\\ 1 & 0& 0& 0& 0& 1& 0\\ 0 & 0& 0& 0& 0& 1& 0\\ 0 & 0& 0& 0& 0& 0& 0\\ 0 & 0& 0& 0& 0& 0& 1\\ 0 & 0& 0& 0& 0& 1& 0 \end{bmatrix} 0010000100000000000001100000010000000110010000010
邻接矩阵表示结点 i i i 和结点 j j j 之间的权重。列表示出发的点,行表示达到的点,比如 a 1 , 2 = 1 a_{1,2} = 1 a1,2=1 表示从结点1到结点2 有一条单向的边。
有权图
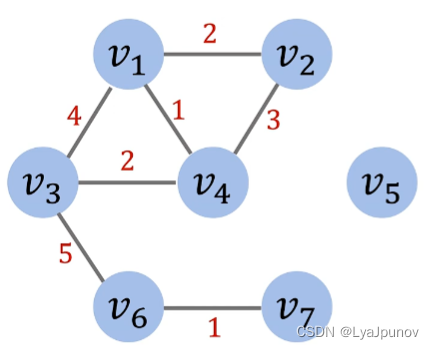
邻接矩阵(Adjacency matrix)
[ 0 2 4 1 0 0 0 2 0 0 3 0 0 0 4 0 2 0 0 5 0 1 3 2 0 0 1 0 0 0 0 0 0 0 0 0 0 5 0 0 0 1 0 0 0 0 0 1 0 ] \begin{bmatrix} 0 & 2& 4& 1& 0& 0& 0\\ 2 & 0& 0& 3& 0& 0& 0\\ 4 & 0& 2& 0& 0& 5& 0\\ 1 & 3& 2& 0& 0& 1& 0\\ 0 & 0& 0& 0& 0& 0& 0\\ 0 & 0& 5& 0& 0& 0& 1\\ 0 & 0& 0& 0& 0& 1& 0 \end{bmatrix} 0241000200300040220501300000000000000510010000010
其实和无向图很像,就是表示两个结点之间的链接,有权图有权重,无权图没有
度矩阵(degree matrix)
度矩阵是图论中一个重要的概念,用于描述无向图或有向图中每个节点的度数。它是一个对角矩阵,矩阵中的元素 d i d_i di 表示节点 i i i 的度数,即与节点 i i i 相连的边的数量。
无向图
上图的度矩阵为
[ 3 0 0 0 0 0 0 0 2 0 0 0 0 0 0 0 3 0 0 0 0 0 0 0 3 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 2 0 0 0 0 0 0 0 1 ] \begin{bmatrix} 3 & 0& 0& 0& 0& 0& 0\\ 0 & 2& 0& 0& 0& 0& 0\\ 0 & 0& 3& 0& 0& 0& 0\\ 0 & 0& 0& 3& 0& 0& 0\\ 0 & 0& 0& 0& 0& 0& 0\\ 0 & 0& 0& 0& 0& 2& 0\\ 0 & 0& 0& 0& 0& 0& 1 \end{bmatrix}
3000000020000000300000003000000000000000200000001
可见,是一个对角矩阵。
有向图
对于有向图而言,可以分为出度矩阵和入度矩阵。出度矩阵代表每个节点的出度,入度矩阵代表每个节点的入度。这个就很好计算了,不在演示
拉普拉斯矩阵(Laplacian matrix)
拉普拉斯矩阵用来表述图的性质,关于拉普拉斯矩阵的计算一般有如下几种方法
1、Symmetric normalized Laplacian:设 L 为图 G 的拉普拉斯矩阵,D 是度数矩阵,则对称归一化拉普拉斯矩阵为 L s y m = D − 1 2 L D − 1 2 L_{sym}=D^{-\frac{1}{2}}LD^{-\frac{1}{2}} Lsym=D−21LD−21。
2、Random walk Laplacian:设 M = D − 1 L M=D^{-1}L M=D−1L,则随机游走拉普拉斯矩阵为 L r w l = I − M L_{rwl} = I-M Lrwl=I−M,其中 I I I 是单位矩阵。
3、Unnormalized Laplacian:不进行归一化的拉普拉斯矩阵可以表示为 L = D − A L=D-A L=D−A,其中A为邻接矩阵,D为度矩阵
矩阵性质[1]
-
0是他的特征值, 1 N 1_N 1N 为特征向量
-
x T ℓ x = 1 2 ∑ i = 1 N ∑ j = 1 N a i j ( x j − x i ) 2 x^T\ell x=\frac{1}{2} \sum_{i=1}^{N} \sum_{j=1}^{N} a_{ij}(x_j-x_i)^2 xTℓx=21∑i=1N∑j=1Naij(xj−xi)2 , ℓ \ell ℓ 的半正定性意味着 ℓ \ell ℓ 的所有特征根都是实数且非负
-
如果G是连通的,那么 ℓ \ell ℓ 的第二小的特征根,可以用 λ 2 ( ℓ ) \lambda_2(\ell) λ2(ℓ) ,称为G的代数连通性,其大于0
-
G的代数连通性等于 m i n x ≠ 0 , 1 N T x = 0 x T ℓ x x T x min_{x \ne 0,1_N^Tx=0} \frac{x^T \ell x}{x^T x} minx=0,1NTx=0xTxxTℓx,因此,如果 $1_N^T x = 0,x^T \ell x \ge \lambda_2(\ell)x^Tx $ 。
参考文献
[1] R. Olfati-Saber, R.M. Murray, Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans. Autom. Control 49(9), 1520–1533 (2004)
文中的图来自王树森大佬的课程,课程并未细看,只需要这些基础知识。