Delaunay三角网
Delaunay三角网定义
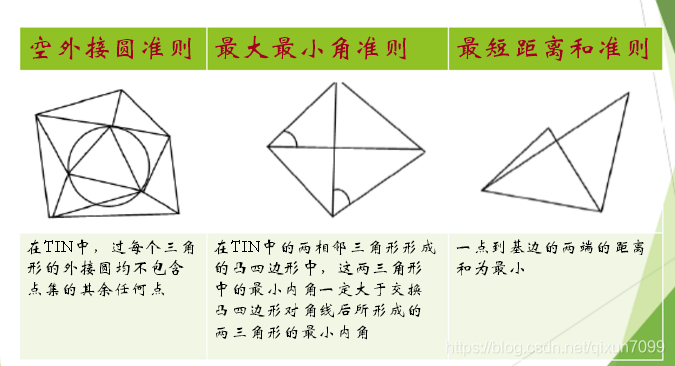
由一系列相连的但不重叠的三角形的集合, 而且这些三角形的外接圆不包含这个面域的其他任何点。
总结一句话就是生成的三角网中的任意一个三角形不能包含其他的三角形的顶点。
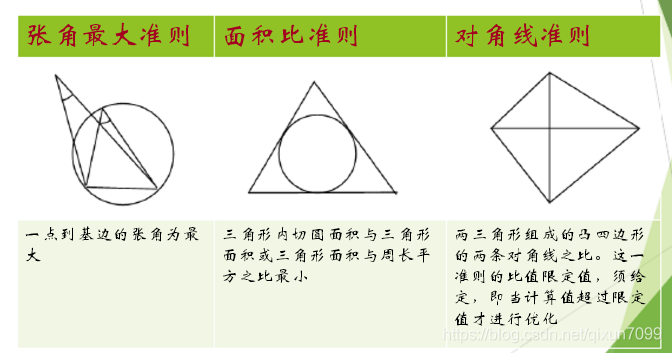
Delaunay三角剖分的重要准则
其中,空外接圆准则和张角最大准则是最常用的两种准则
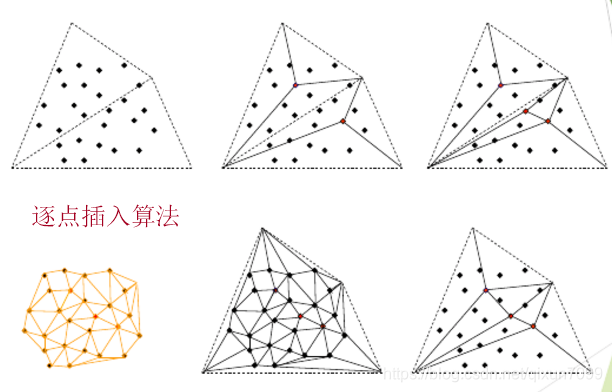
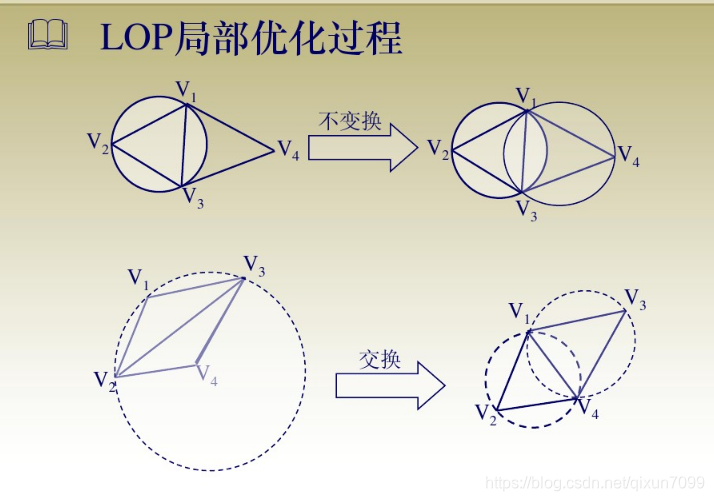
Lawson的局部优化算法(LOP)
对于生成三角网的过程,在已经生成的三角网中插入新的点,会导致新三角网不再符合三角形剖分准则。基于最大最小角规则,Lawson也给出了局部优化算法(LOP),交换凸四边形的对角线,保留短的那条对角线,使三角网中所有三角形的最小角度最大化。
因此,在构网过程中,或者在原有的三角网中插入新的点集不需要每次都遍历整个三角网查找不符合三角剖分的三角形,并进行优化,因为除了新插入的点外的三角网都是符合三角剖分的。因此,LOP只需检测新三角形及其临近三角形,使其符合三角剖面即可,这样大大的节约了时间消耗。
不规则三角网(TIN)的建立
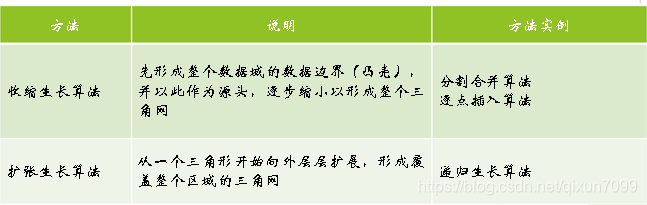
三角网构建方法:
分割合并算法
采用分而治之策略,将复杂问题简单化:
先将数据点分割成易于三角化的点子集(如每子集3、4个点),后对每个子集分别三角化,并由LOP优化成D_三角网;之后对每个子集的三角网进行合并,形成最终的D_三角网。
分割合并三角化算法如图所示:
STEP1
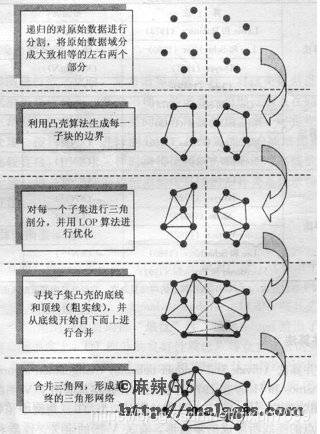
将数据集以横坐标为主、纵坐标为辅按升序排序。
STEP2
如数据集中点数大于阀值,则继续将数据集化为点个数近似相等的两个子集,并对每个子集做如下工作:
① 获取每子集的凸壳;
② 以凸壳为数据边界进行三角化,并用LOP优化成D三角网;
③ 找出连接左右子集两个凸壳的底线和顶线;
④ 由底线到顶线合并两个三角网。
STEP3
如数据集中点数不大于阀值,则直接输出三角剖分结果。
数据点集采用递归分割快速排序法;子集凸壳的生成可采用格雷厄姆算法(见后);子集三角化可采用任意方法,如子集最小到3或4个点则可直接三角剖分之;子网合并则需先找出左右子集凸壳的底线和顶线(算法见后),然后逐步合并三角剖分得到最终D三角网。