三角剖分是一种应用非常广泛的面重建技术。三角剖分将一些散乱的点云数据剖分为一些系列的三角网格。最常见的三角剖分技术是Delaunay三角剖分。Delaunay三角剖分具有许多优良的性质。如最大化最小角特性,即在所有可能的三角剖分中,其所生成的三角形的最小角的角度最大。所以,Delaunay三角剖分无论从那个区域开始构建,最终生成的三角网格是唯一的。
基本概念
问题描述
如何把一个散点集合剖分成不均匀的三角形网格,这就是散点集的三角剖分问题,散点集的三角剖分,对数值分析以及图形学来说,都是极为重要的一项预处理技术。该问题图示如下:
三角剖分定义
三角剖分:假设V是二维实数域上的有限点集,边e是由点集中的点作为端点构成的封闭线段, E为e的集合。那么该点集V的一个三角剖分T=(V,E)是一个平面图G,该平面图满足条件:
- 除了端点,平面图中的边不包含点集中的任何点。
- 没有相交边。
- 平面图中所有的面都是三角面,且所有三角面的合集是散点集V的凸包。
Delaunay三角剖分的定义
在实际中运用的最多的三角剖分是Delaunay三角剖分,它是一种特殊的三角剖分。先从Delaunay边说起。Delaunay边的定义:假设E中的一条边e(两个端点为a,b),e若满足下列条件,则称之为Delaunay边:存在一个圆经过a,b两点,圆内(注意是圆内,圆上最多三点共圆)不含点集V中任何其他的点,这一特性又称空圆特性。Delaunay三角剖分的定义:如果点集V的一个三角剖分T只包含Delaunay边,那么该三角剖分称为Delaunay三角剖分。
Delaunay三角剖分的准则
要满足Delaunay三角剖分的定义,必须符合两个重要的准则:
1、空圆特性:Delaunay三角网是唯一的(任意四点不能共圆),在Delaunay三角形网中任一三角形的外接圆范围内不会有其它点存在。如下图所示:
2、最大化最小角特性:在散点集可能形成的三角剖分中,Delaunay三角剖分所形成的三角形的最小角最大。从这个意义上讲,Delaunay三角网是“最接近于规则化的“的三角网。具体的说是指在两个相邻的三角形构成凸四边形的对角线,在相互交换后,六个内角的最小角不再增大。如下图所示:
局部最优化处理
理论上为了构造Delaunay三角网,Lawson提出的局部优化过程LOP(Local Optimization Procedure),一般三角网经过LOP处理,即可确保成为Delaunay三角网,其基本做法如下所示:
1.将两个具有共同边的三角形合成一个多边形。
2.以最大空圆准则作检查,看其第四个顶点是否在三角形的外接圆之内。
3.如果在,修正对角线即将对角线对调,即完成局部优化过程的处理。
LOP处理过程如下图所示:
Delaunay剖分的算法
Delaunay剖分是一种三角剖分的标准,实现它有多种算法。Delaunay三角形的算法,有翻边算法、逐点插入算法、分割合并算法、Bowyer-Watson算法等。
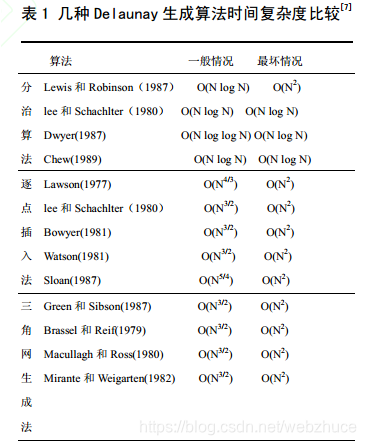
由上图可以看出,三角网生成法的时间效率最低,分治算法的时间效率最高,逐点插入法效率居中。由于区域生长法本质的缺陷,导致其效率受限,这种方法在80年代中期以后已经很少使用。分治算法时间效率相对较高,但是由于其递归执行,所以需要较大的内存空间,导致其空间效率较低。此外,分治法的数据处理及结果的优化需要的工作量也比较大。逐点插入算法实现简单,时间效率比较高,而运行占用的空间也较小,从时间效率和空间效率综合考虑,性价比最高,因而应用广泛。1977年,Lawson提出了逐点插入法建立Delaunay三角网的算法思想。之后Lee和Schachlter,Bowyer,Watson,Sloan,先后进行了发展和完善。他们的算法在初始化三角网的建立方法、定位点所在三角形的过程、以及插入的过程方面各具特点。
Lawson算法
逐点插入的Lawson算法是Lawson在1977年提出的,该算法思路简单,易于编程实现。基本原理为:首先建立一个大的三角形或多边形,把所有数据点包围起来,向其中插入一点,该点与包含它的三角形三个顶点相连,形成三个新的三角形,然后逐个对它们进行空外接圆检测,同时用Lawson设计的局部优化过程LOP进行优化,即通过交换对角线的方法来保证所形成的三角网为Delaunay三角网。
上述基于散点的构网算法理论严密、唯一性好,网格满足空圆特性,较为理想。由其逐点插入的构网过程可知,遇到非Delaunay边时,通过删除调整,可以构造形成新的Delaunay边。在完成构网后,增加新点时,无需对所有的点进行重新构网,只需对新点的影响三角形范围进行局部联网,且局部联网的方法简单易行。同样,点的删除、移动也可快速动态地进行。但在实际应用当中,这种构网算法当点集较大时构网速度也较慢,如果点集范围是非凸区域或者存在内环,则会产生非法三角形。
Bowyer-Watson算法
目前采用逐点插入方式生成的Delaunay三角网的算法主要基于Bowyer-Watson算法,Bowyer-Watson算法的主要步骤如下:
- 建立初始三角网格:针对给定的点集V,找到一个包含该点集的矩形R,我们称R为辅助窗口。连接R的任意一条对角线,形成两个三角形,作为初始Delaunay三角网格。
- 逐点插入:假设目前已经有一个Delaunay三角网格T,现在在它里面再插入一个点P,需要找到该点P所在的三角形。从P所在的三角形开始,搜索该三角形的邻近三角形,并进行空外接圆检测。找到外接圆包含点P的所有的三角形并删除这些三角形,形成一个包含P的多边形空腔,我们称之为Delaunay空腔。然后连接P与Delaunay腔的每一个顶点,形成新的Delaunay三角网格。
- 删除辅助窗口R:重复步骤2),当点集V中所有点都已经插入到三角形网格中后,将顶点包含辅助窗口R的三角形全部删除。
在这些步骤中,快速定位点所在的三角形、确定点的影响并构建Delaunay腔的过程是每插入一个点都会进行的。随着点数的增加,三角形数目增加很快,因此缩短这两个过程的计算时间,是提高算法效率的关键。算法执行图示如下:
示例演示
下面我们对优化过的Bowyer-Watson算法进行实现,伪代码如下:
input: 顶点列表(vertices) //vertices为外部生成的随机或乱序顶点列表
output:已确定的三角形列表(triangles)
初始化顶点列表
创建索引列表(indices = new Array(vertices.length)) //indices数组中的值为0,1,2,3,......,vertices.length-1
基于vertices中的顶点x坐标对indices进行sort //sort后的indices值顺序为顶点坐标x从小到大排序(也可对y坐标,本例中针对x坐标)
确定超级三角形
将超级三角形保存至未确定三角形列表(temp triangles)
将超级三角形push到triangles列表
遍历基于indices顺序的vertices中每一个点 //基于indices后,则顶点则是由x从小到大出现
初始化边缓存数组(edge buffer)
遍历temp triangles中的每一个三角形
计算该三角形的圆心和半径
如果该点在外接圆的右侧
则该三角形为Delaunay三角形,保存到triangles
并在temp里去除掉
跳过
如果该点在外接圆外(即也不是外接圆右侧)
则该三角形为不确定 //后面会在问题中讨论
跳过
如果该点在外接圆内
则该三角形不为Delaunay三角形
将三边保存至edge buffer
在temp中去除掉该三角形
对edge buffer进行去重
将edge buffer中的边与当前的点进行组合成若干三角形并保存至temp triangles中
将triangles与temp triangles进行合并
除去与超级三角形有关的三角形
end
C++代码下载。运行结果如下,与VTK图形处理之Delaunay三角剖分结果一样。

参考资料
- Triangulate
- 三角剖分算法(delaunay)
- VTK图形处理之Delaunay三角剖分