1 调试
官方教程链接:https://docs.qgroundcontrol.com/master/en/SetupView/SetupView.html
1.1 烧录程序
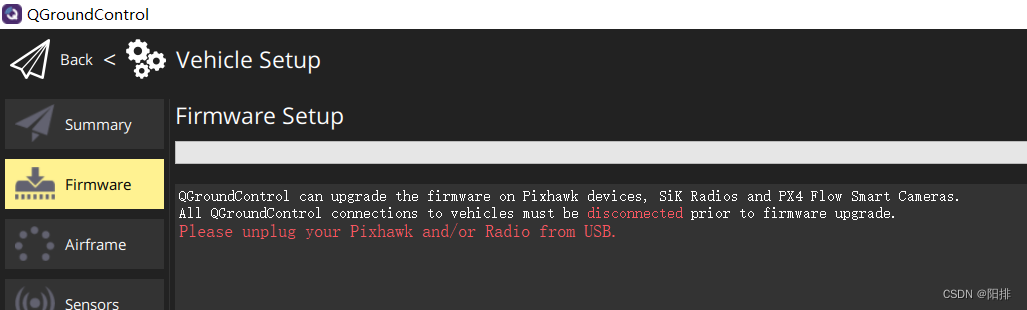
电脑先打开QGC,进入Vehicle Setup,点击Firmware。无人机飞控使用USB线连接电脑,然后选择烧录的.px4程序(可以是官方的,也可以是自己编译生成的)。
1.2 选择机型
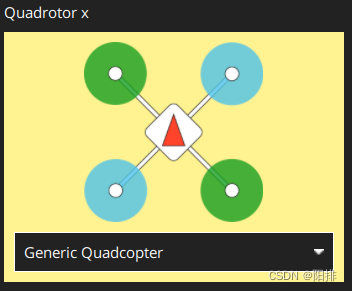
点击Airframe,如果无人机为四旋翼,则点击Generic Quadcopter,然后点击右上角Apply and Restart。
1.3 校准传感器
1、校准罗盘:点击Sensors,Compass,按照QGC的提示旋转无人机,重启无人机。
2、校准陀螺仪:点击Gyroscope,按照QGC的提示旋转无人机。
3、校准加速度计:点击Accelerometer,按照QGC的提示旋转无人机。
4、校准地平线:点击Level Horizon,静止放置无人机。
1.4 校准遥控器
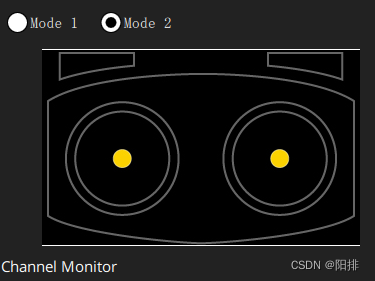
点击Radio,Calibrate,将遥控器的油门档置中立位,按照英文提示拨动遥控器摇杆。右侧示意图表示摇杆应该放置的位置。
1.4.1 辅助通道控制云台
使用Strom云台,云台上搭载相机(重量60-150g)。
采用Channel 9和Channel 10控制云台的俯仰角和偏航角。
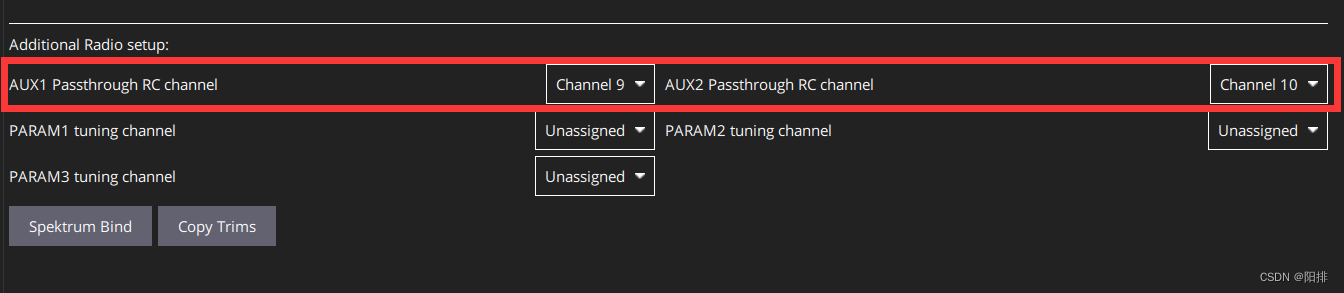
无人机飞控的AUX OUT口输出占空比为5-10%的PWM波。
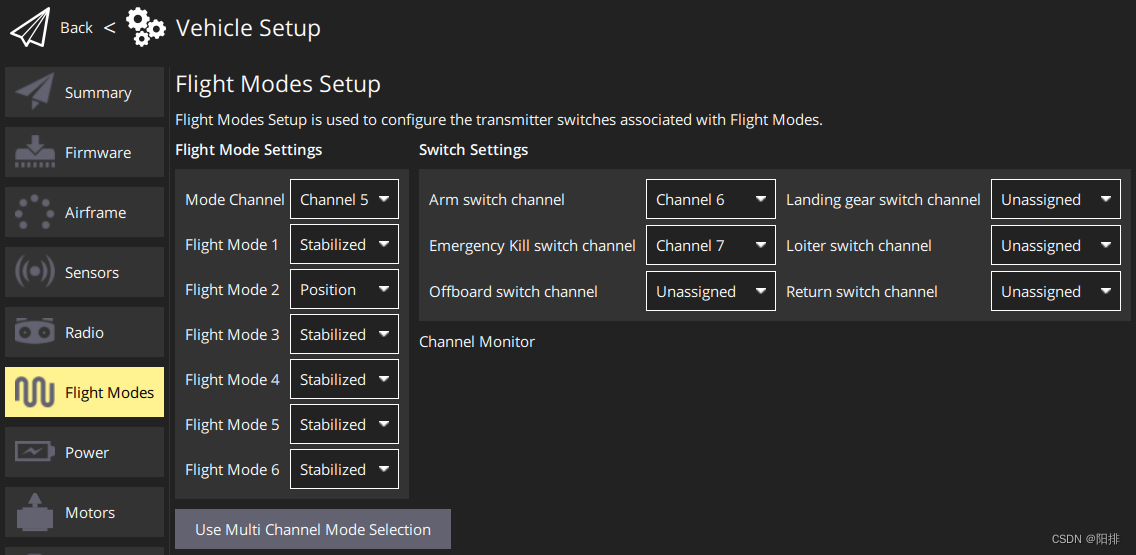
1.5 飞行模式
将三个档位的开关作为飞行模式设置档。
Arm switch channel为无人机解锁档(可能有怠速)。
Emergency Kill switch channel为无人机紧急关闭档(无人机油门完全关闭)。
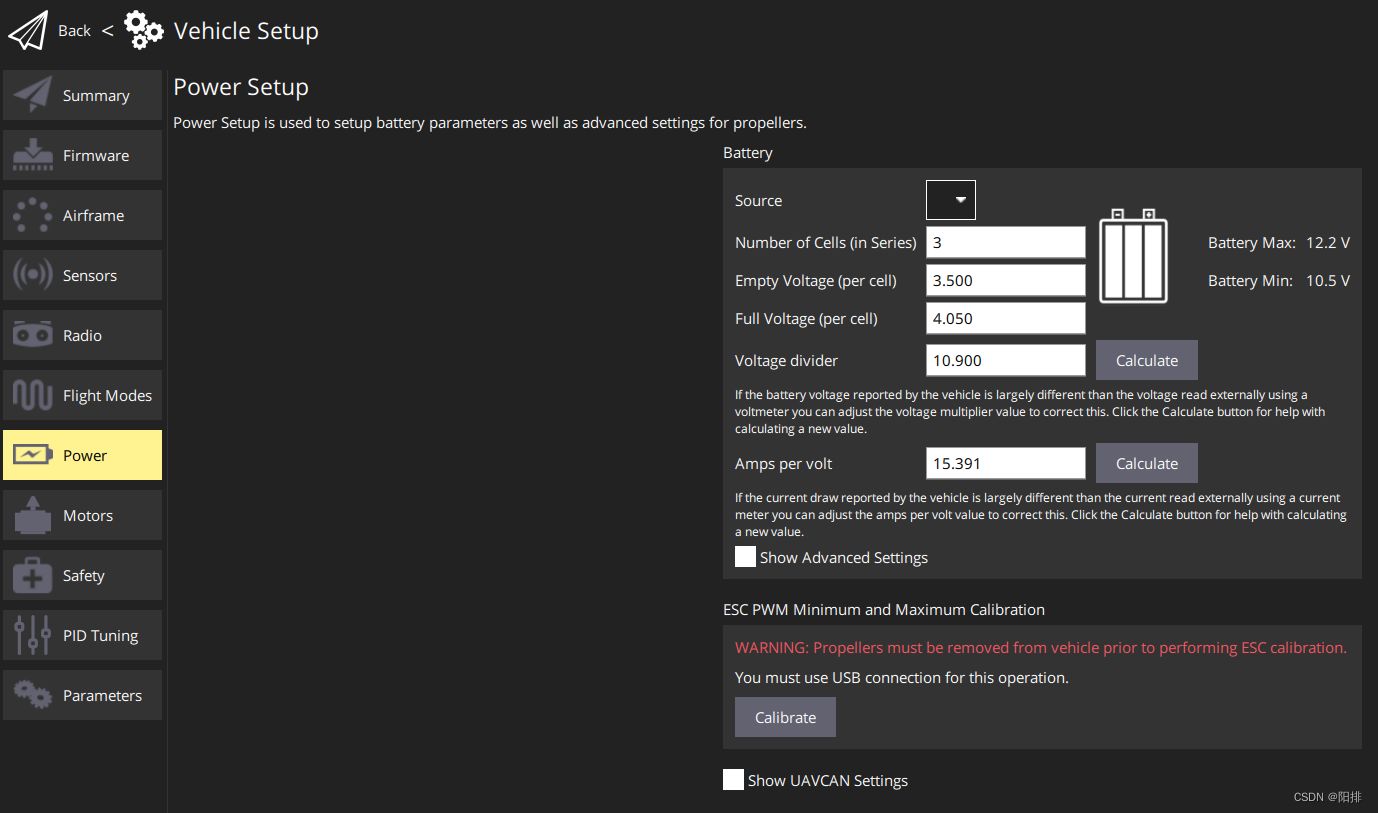
1.6 电池电量校准
点击Power,先不要连接电池。点击Calibrate,再连接电池。等到弹出提示框能够移除电池,再拔掉电池。
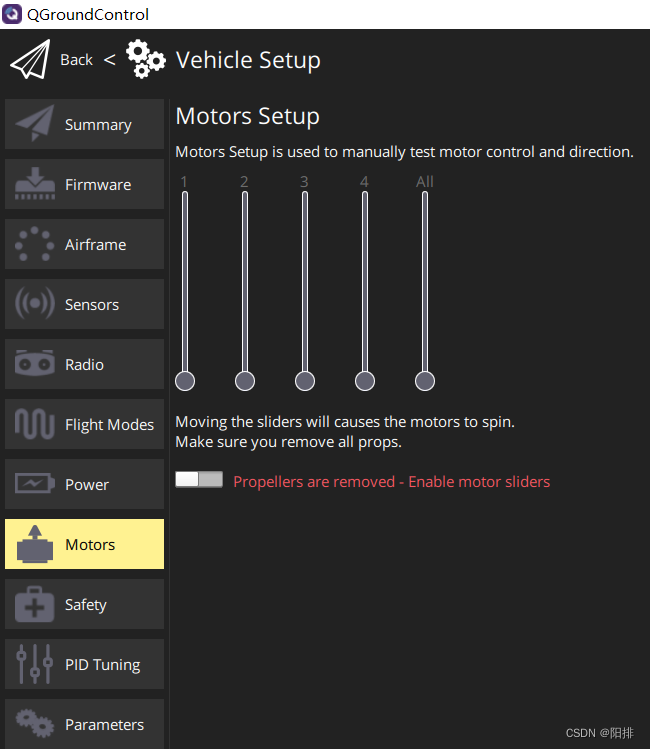
1.7 电机测试
测试电机转向是否正确。点击Motors。
查看电机旋转方向是否左前和右后侧为顺时针,右前和左后侧为逆时针,如果相反,则交换电调和电机之间的任意两路导线。
1.8 参数设置
禁用安全开关,将CBRK_IO_SAFETY设置为最大。
禁用USB连接检测,将CBRK_USB_CHK设置为最大。
还有一些需要关闭,按照自己的情况设置。
2 无人机使用数传模块(3DR Mavlink)
由于Pixhawk2.4.8飞控的USB端口无法向外供电,因此数传模块需要连接在TELEM 1端口。
2.1 数传模块驱动安装
下载链接:链接:https://pan.baidu.com/s/1CUfLqMplGhhdQqyMdn-kfQ?pwd=b0dh
提取码:b0dh
看自己电脑系统版本是32位还是64位,对应安装就行了。
2.2 数传模块对频
首先只连接一个数传模块,等到绿灯闪烁,长按数传模块上的Bind按钮3秒直到红灯闪烁。此时给另外一块数传模块供电,过了一会儿,两个数传模块绿灯常亮就说明对频成功。
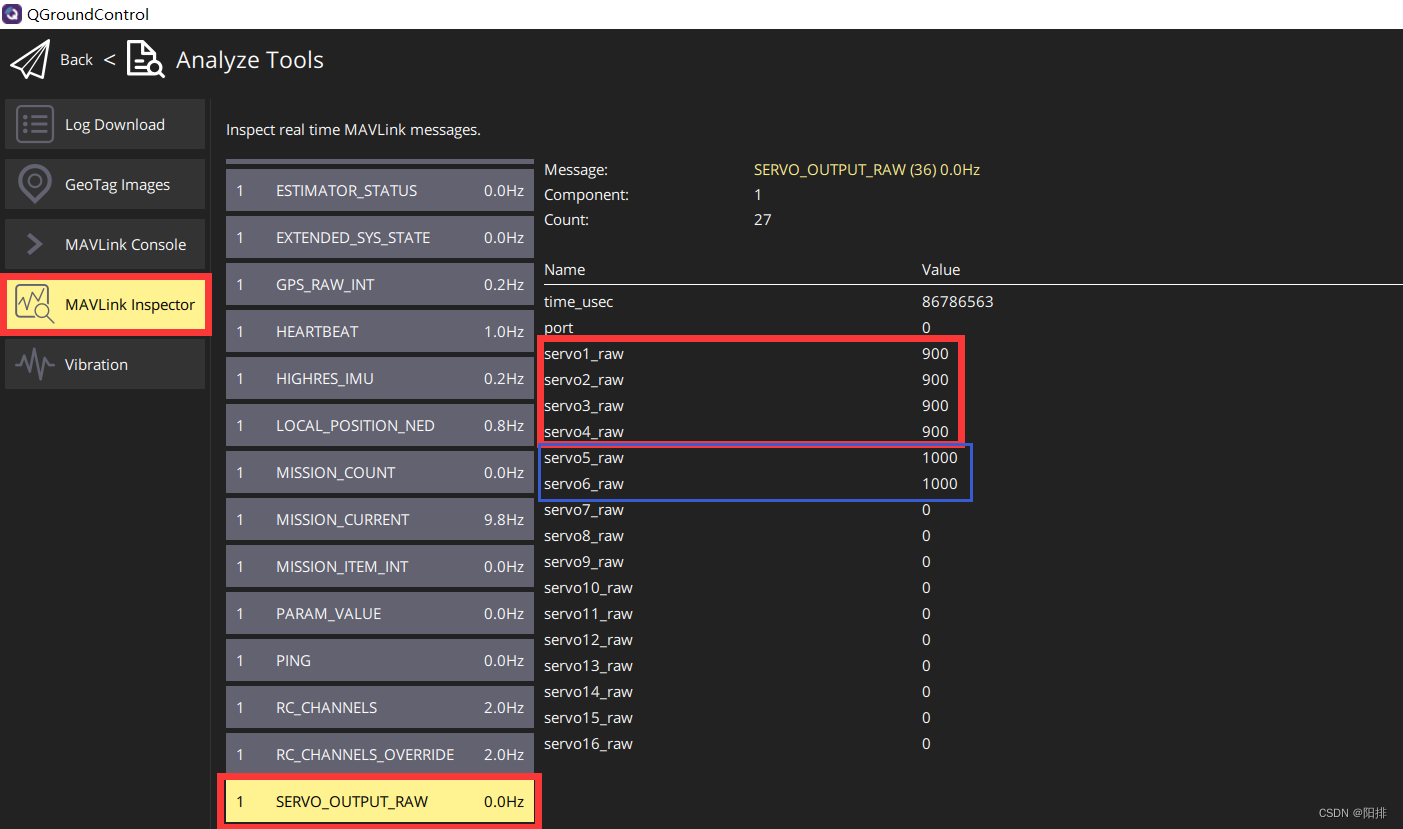
3 数据分析
进入Analyze Tools,点击MAVLink Inspector。
3.1 电机转速查看
点击SERVO_OUTPUT_RAW查看飞控输出的PWM信号。无人机锁定(Disarmed)时,servo1/2/3/4_raw的值都为900。无人机解锁(Armed)后,按照油门大小servo1/2/3/4_raw的值域为1000-2000,设置怠速的话为1075。servo5/6_raw为云台的两个控制端口,输出范围为1000-2000。
3.2 读取串口TELEM 2(USART3)数据
参考链接:https://zhuanlan.zhihu.com/p/116464817
https://blog.csdn.net/qq_38768959/article/details/123257342
3.3 MAVLink输出自定义信息
参考链接:https://blog.csdn.net/qq_54784198/article/details/126979821