目录
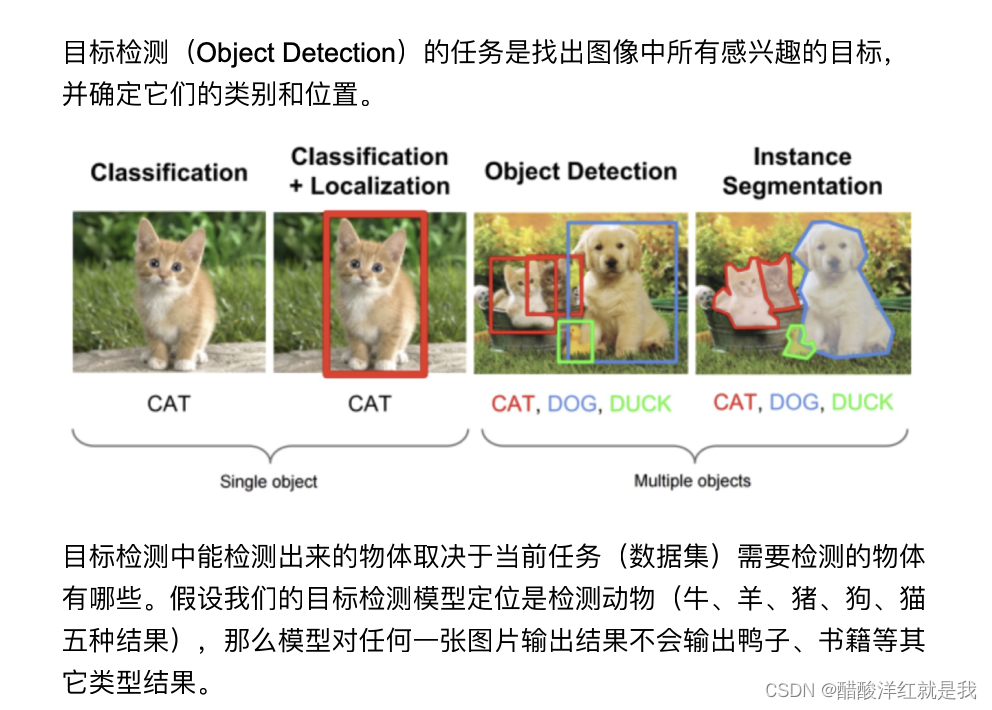
目标检测
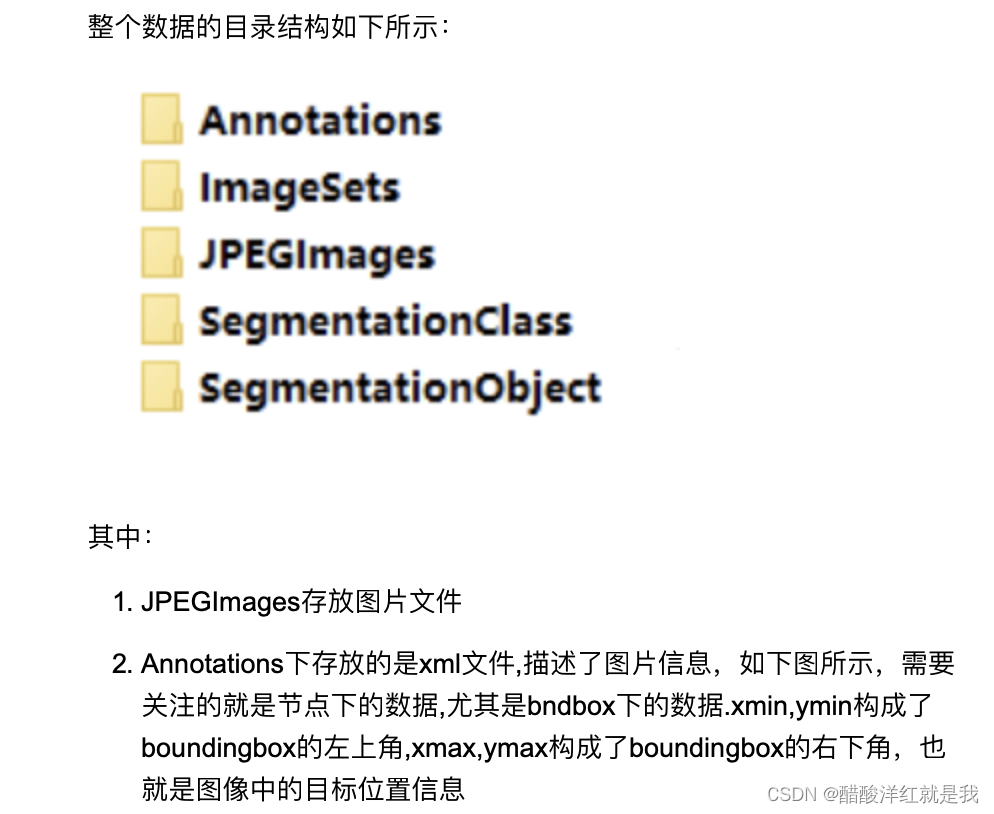
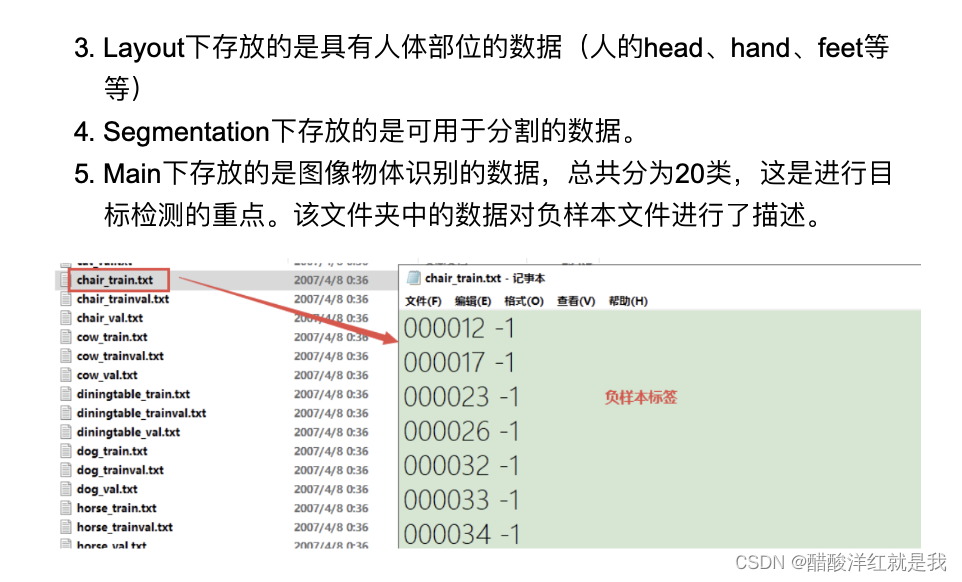
常用的开源数据集
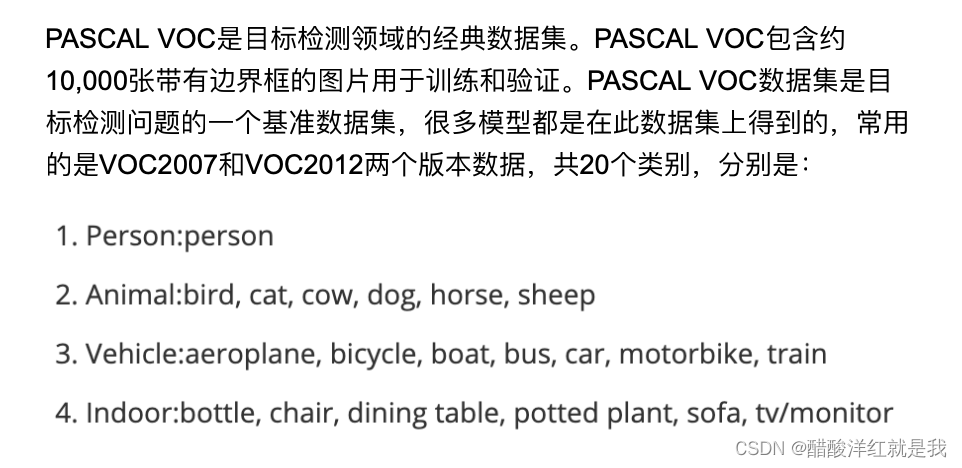
PASCAL VOC数据集

MS COCO数据集

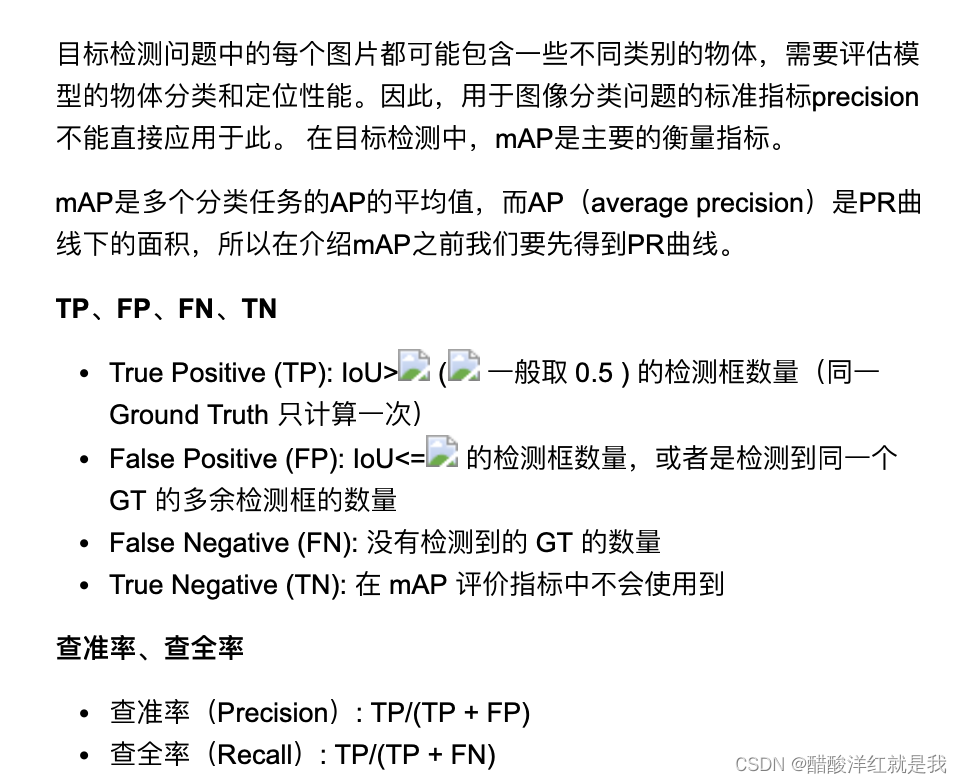
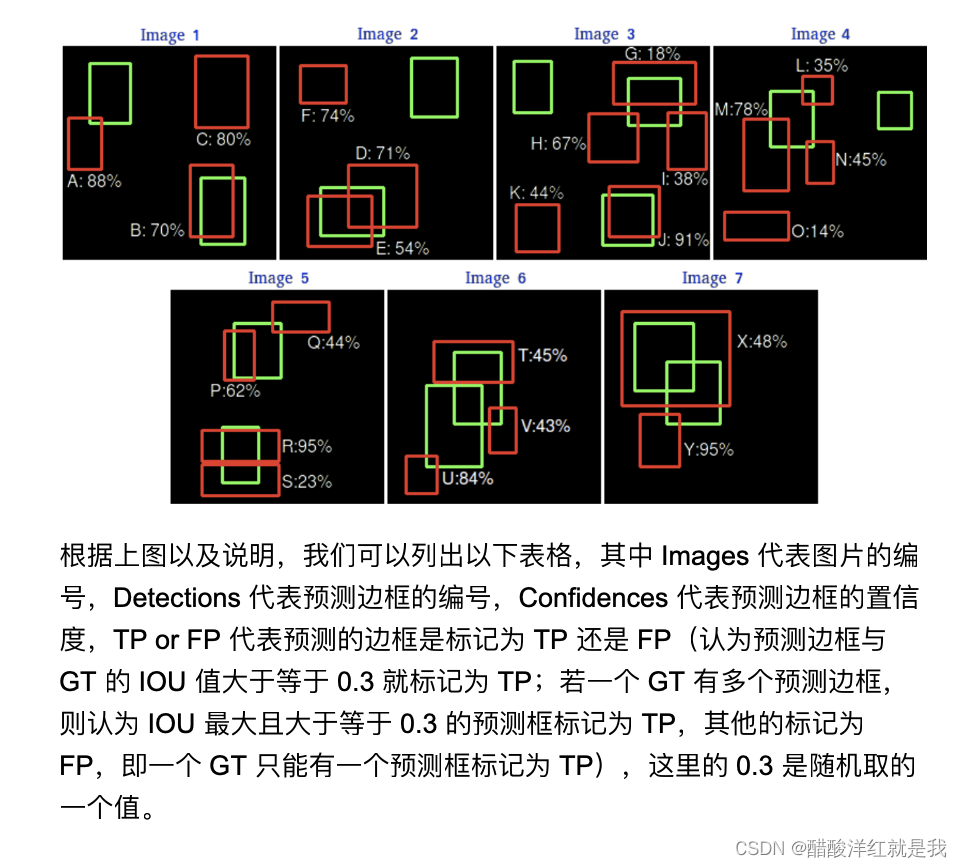
常用的评价指标
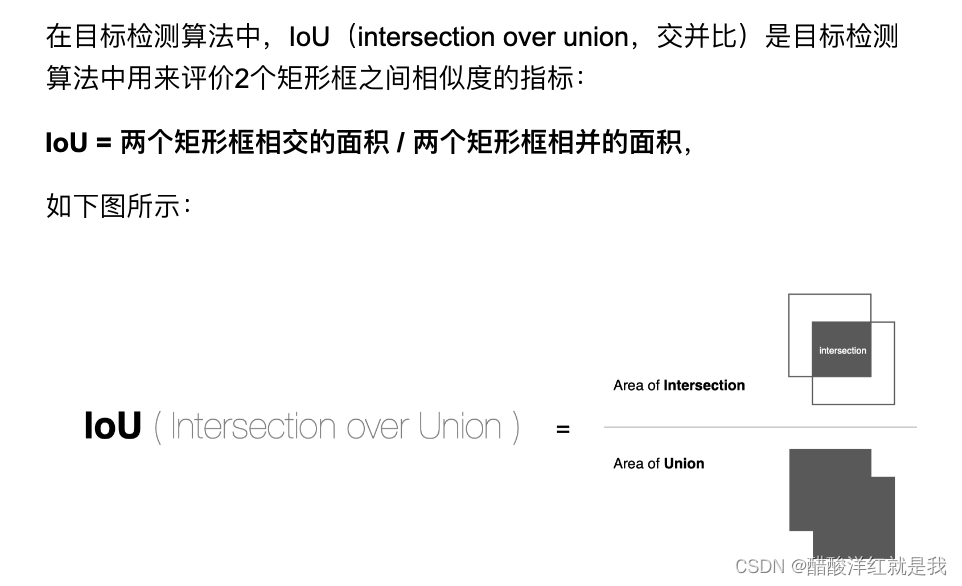
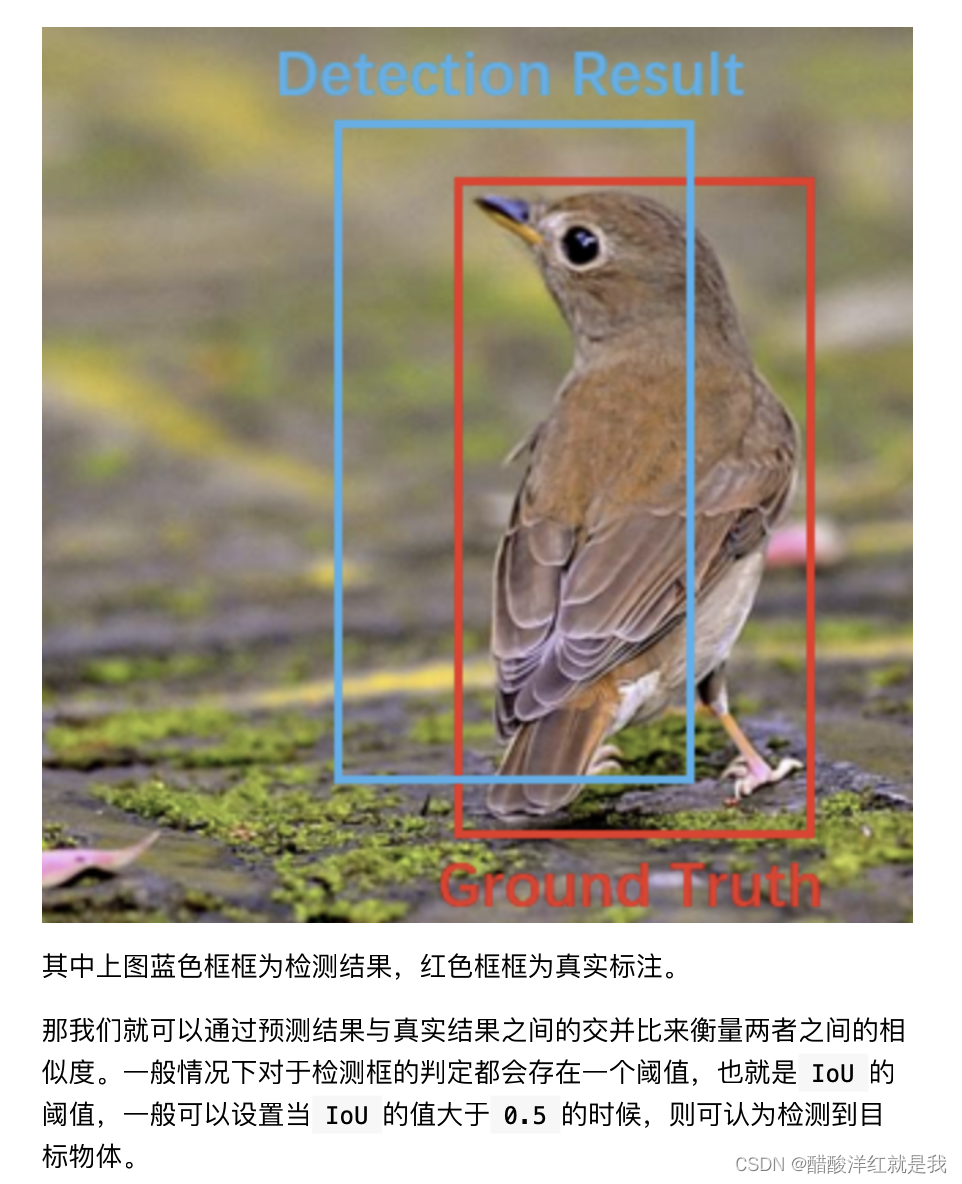
IOU(交并比)
import numpy as np
def IOU(box1,box2,wh=False):
#判断表示方式
if wh==False:
#极坐标表示
xmin1,ymin1,xmax1,ymax1=box1
xmin2,ymin2,xmax2,ymax2=box2
else:
#中心点坐标表示
#第一框
xmin1,ymin1=int(box1[0]-box1[2]/2.0),int(box1[1]-box1[3]/2.0)
xmax1,ymax1=int(box1[0]+box1[2]/2.0),int(box1[1]+box1[3]/2.0)
#第二框
xmin2,ymin2=int(box2[0]-box2[2]/2.0),int(box2[1]-box2[3]/2.0)
xmax2,ymax2=int(box2[0]+box2[2]/2.0),int(box2[1]+box2[3]/2.0)
#获取交集的左上角和右下角坐标
xx1=np.max(xmin1,xmin2)
yy1=np.max(ymin1,ymin2)
xx2=np.min(xmax2,xmax1)
yy2=np.min(ymax1,ymax2)
#计算交集面积
inter_area=(np.max(0,xx2-xx1))*(np.max(0,yy2-yy1))
#计算并的面积
area1=(xmax1-xmin1)*(ymax1-ymin1)
area2=(xmax2-xmin2)*(ymax2-ymin2)
union_area=area1+area2-inter_area
#IOU
IOU=inter_area/(union_area+1e-6)
return IOU
import matplotlib.pyplot as plt
import matplotlib.patches as patches #给图像打上矩形框
#真是框 预测框
true_box=[100,35,398,400]
pre_box=[40,150,355,398]
#将框绘制在图像上
img=plt.imread('dog.jpeg')
fig=plt.imshow(img)
#将真实框和预测框绘制在图像上
fig.axes.add_patch(plt.Rectangle((true_box[0],
true_box[1],
width=true_box[2]-true_box[1],
height=true_box[3]-true_box[1],
fill=False,
edgcolor='blue',
linewidth=2)))
fig.axes.add_patch(plt.Rectangle((pre_box[0],
pre_box[1],
width=pre_box[2]-pre_box[1],
height=pre_box[3]-pre_box[1],
fill=False,
edgcolor='red',
linewidth=2)))
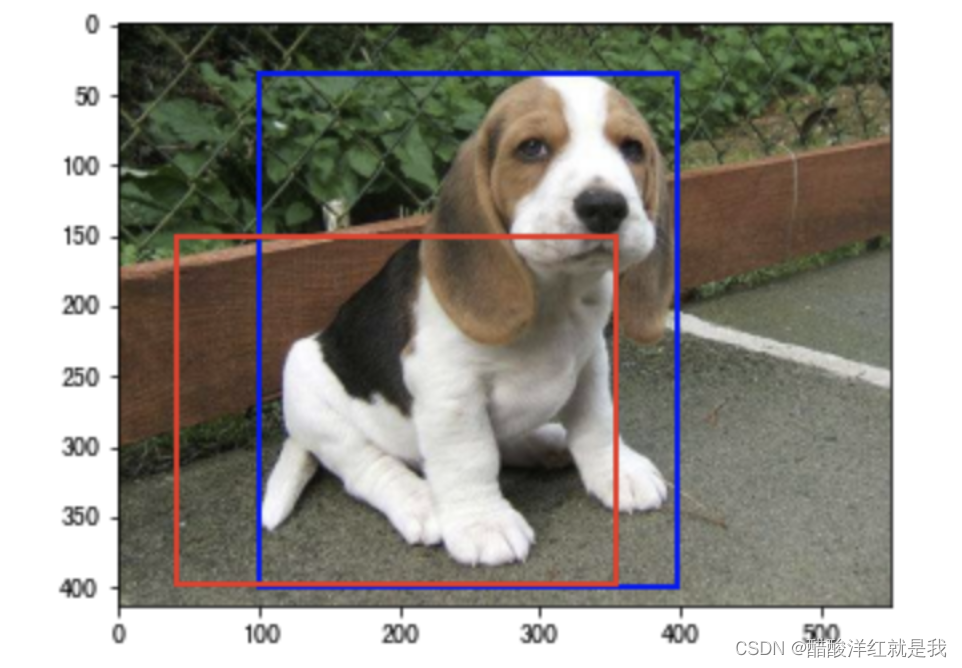
IOU(ture_box,pre_box)
0.5114435907762924
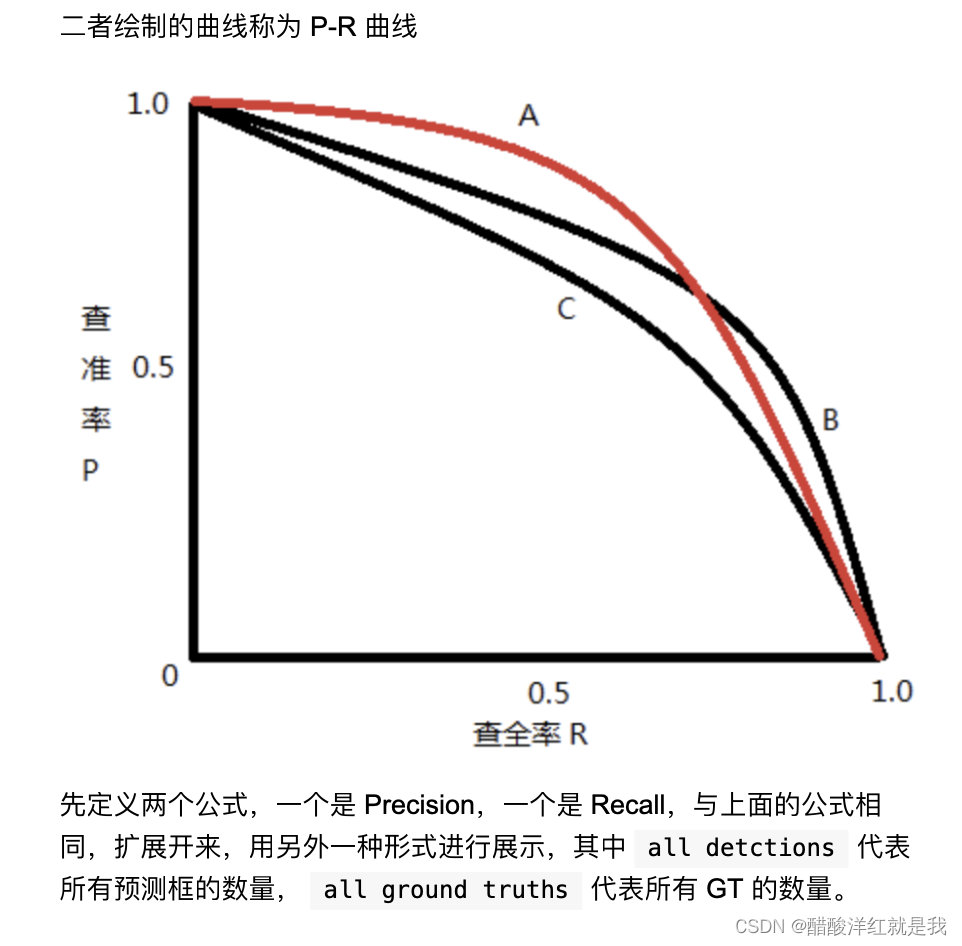
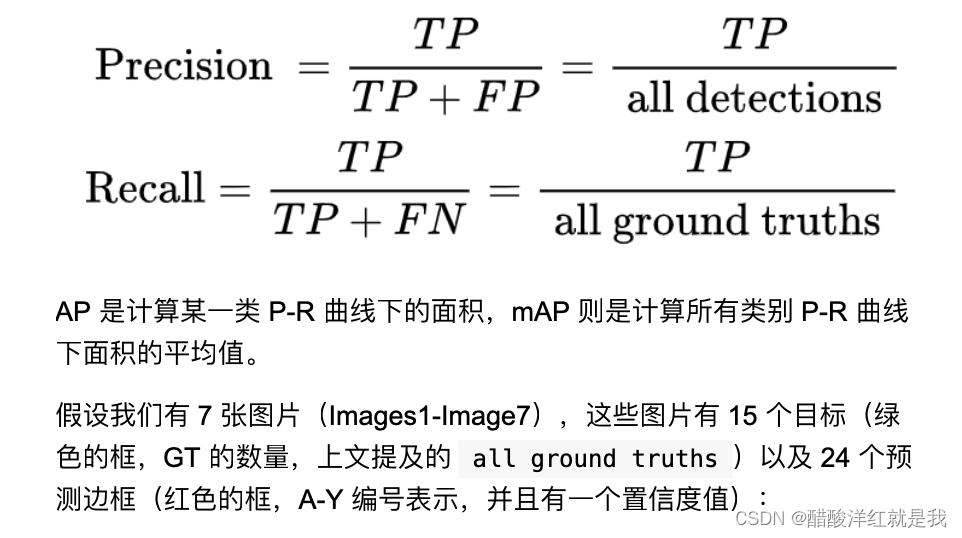
mAP(Mean Average Precision)
voc2010前,求取Recall11个点对应的presion,求平均
voc2010后,使用分段函数的线下面积
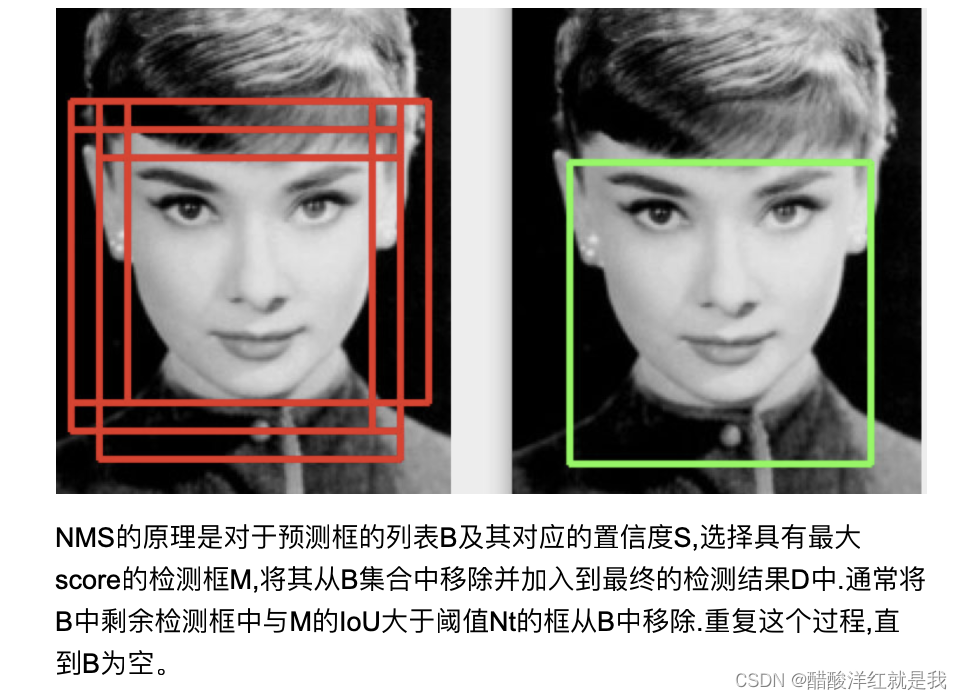
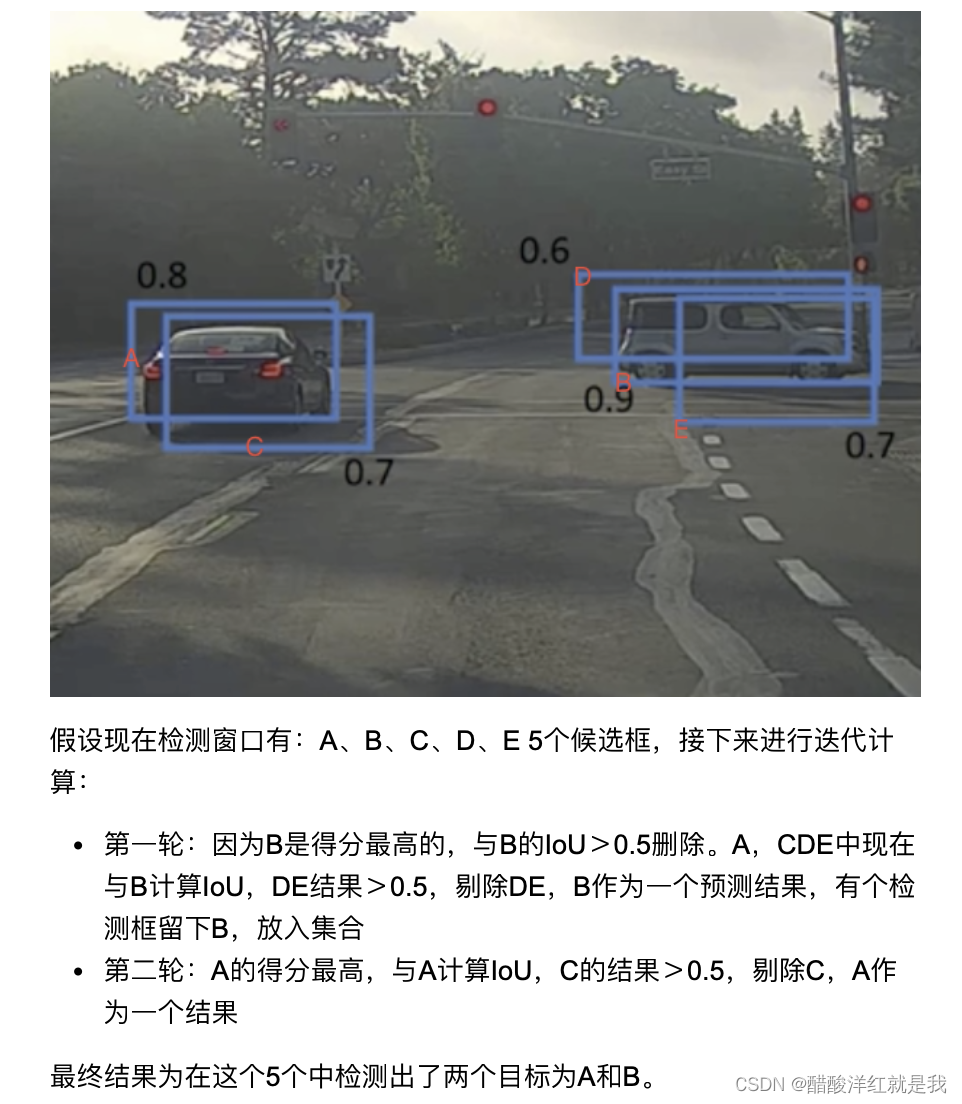
NMS(非极大值抑制)
去除冗余检测框,保留最好的一个
def nms(boxes,score,thre):
#容错处理
if (len(boxes)==0):
return [],[]
#类型转换
#box使用极坐标
boxes=np.array(boxes)
score=np.array(score)
#获取左上角和右下角坐标
x1=boxes[:,0]
y1=boxes[:,1]
x2=boxes[:,2]
y2=boxes[:,3]
#计算面积
areas=(x2-x1)*(y2-y1)
#NMS
picked_boxes=[]
picked_socre=[]
#排序:小->大
order=np.argsort(score)
while order.size>0:
#获取score最大的索引
index=order[-1]
#保留下来
picked_boxes.append(boxes[index])
picked_score.append(score[index])
#计算IOU
#交的面积
x11=np.maximum(x1[index],x1[order[:-1]])
y11=np.maximum(y1[index],y1[order[:-1]])
x22=np.maximum(x2[index],x2[order[:-1]])
y22=np.maximum(y2[index],y2[order[:-1]])
w=np.maximum(0.0,x22-x11)
h=np.maximum(0.0,y22-y11)
inter_area=w*h
#交并比
iou=inter_area/(areas[index]+areas[order[:-1]]-inter_area)
#删除冗余框
keep_boxes=np.where(iou<thre)
#更新order
order=order[keep_boxes]
return picked_boxes,picked_score
bounding=[(187,82,337,317),(150,67,305,282),(246,121,368,304)]
confidence_score=[0.9,0.65,0.8]
threshold=0.5
box,score=nms(bounding,confidence_score,threshold)
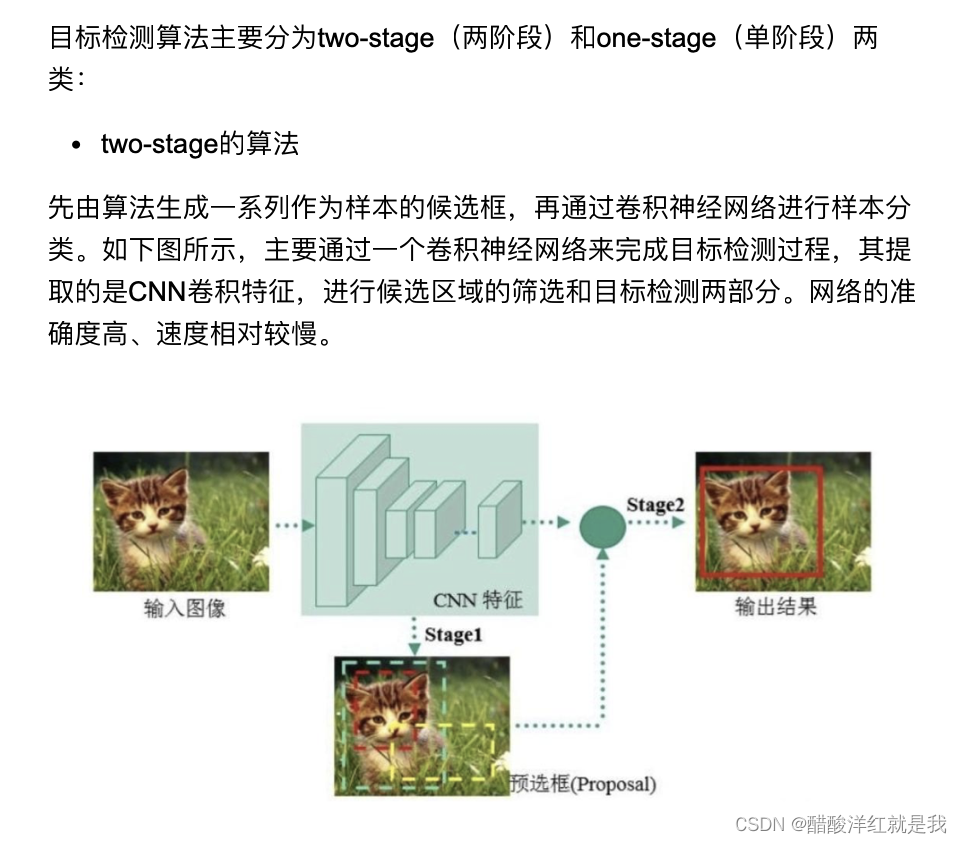
目标检测方法分类