修改系统要用的模型
这周工作是修改模型,因为曾经项目遗留下来的一套太极拳动画的模型的骨骼,并不能为我们所用。他的模型不是诺亦腾的默认骨骼,这导致了无法在UE4里用诺亦腾驱动模型。经过咨询老师,我们放弃了直接修改动捕后的动画骨骼(一是所有骨骼已经K上关键帧,二是调整骨骼会产生对模型外观的影响),最后我决定将太极拳人物模型绑定到诺亦腾标准骨骼上。
1、首先我将之前的模型删除动画,解除蒙皮,分离骨骼和身体。
2、然后把诺亦腾标准骨骼导入,再对模型进行缩放等调整,使得骨骼能贯穿模型里面。
3、进行绑定蒙皮操作
绑定后效果:
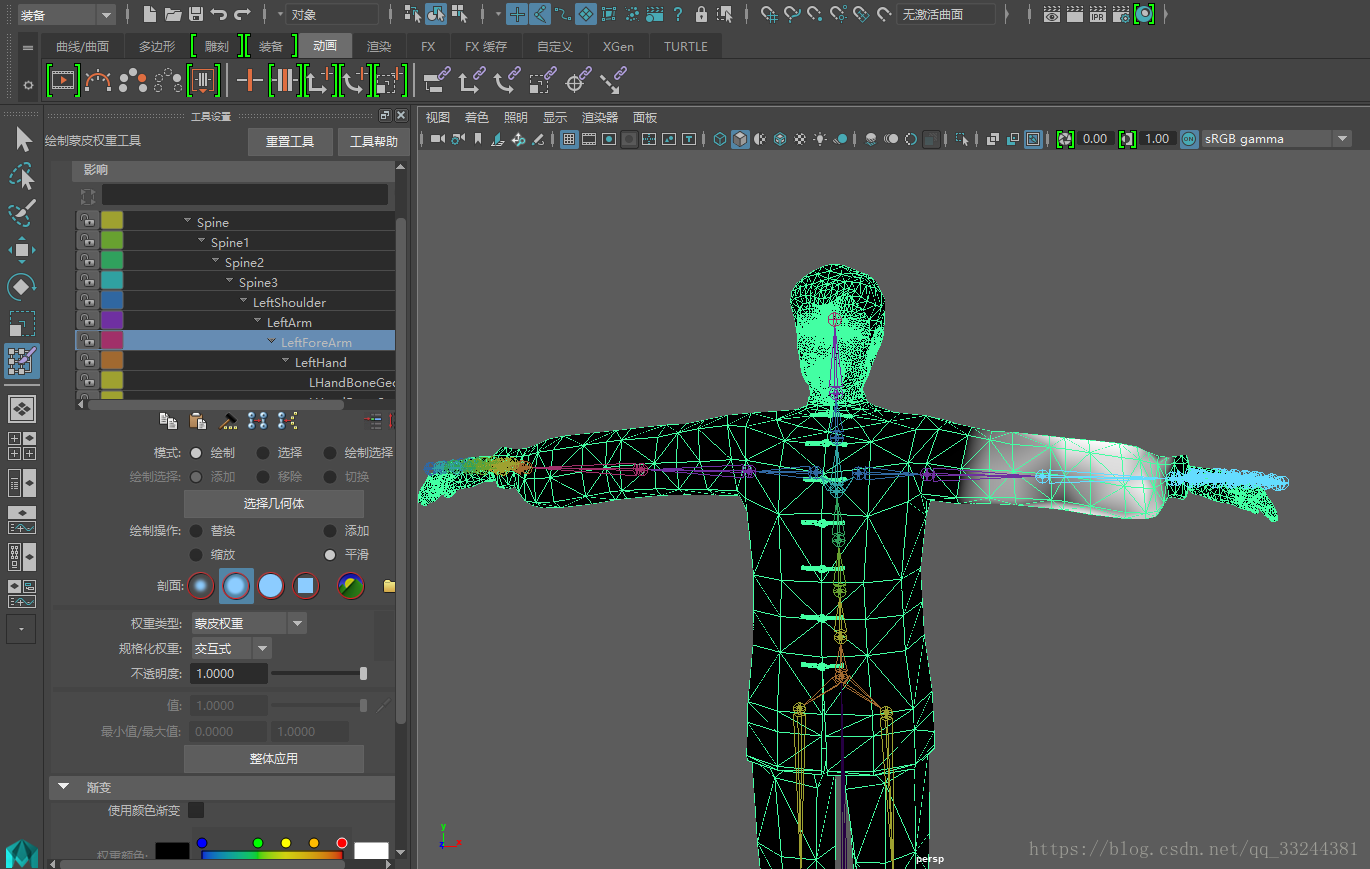
刷权重
如下图,蒙皮->绘制蒙皮权重,来对绑定到各个骨骼的蒙皮进行刷权重。刷权重是一个慢活,要细致地去刷,所以在这里花了不少时间。

最后在组员协助下捕捉了一套太极拳。发现有时候脚在落地的时候会忽然抖一下,在诺亦腾贴吧里看到说是因为诺亦腾会检测你的脚是不是离地非常近,当他认为你的脚落到地上时,他会自动帮你吸附过去。(emmm我还能说什么呢大概这就是人性化吧)
把动捕后的动画按招式分好,便于下一步使用。
