这周主要进行了人物模型和示例动画的制作和利用动捕进行舞蹈学习的论文的学习。
- 使用Neuron和Motion Builder进行了太极拳动作的采集和处理。以下是我使用Motion Buileder导出模型到MAYA,再导入UE4中的一些心得。
1.如果直接将Motion Builder得到的动画导入UE4中会发生多根根骨骼的情况。因此要导入到MAYA中进行预处理。具体步骤如下:
将Motion Builder导出的FBX 文件导入MAYA中,可以发现出现了两套骨骼。
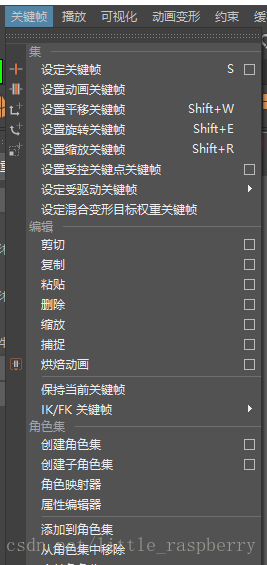
选中带有模型的骨骼的根骨骼,选择层次,选中全部骨骼,将模式调到动画模式,在关键帧选项下选择烘焙动画:
此时再删除不包含模型的骨骼。(可以在大纲视图下选择)
ps:进行动画预览可发现两个骨骼是一起动的,因为处于父子绑定关系,但是如果删除NoitomRobot,可发现剩下的骨骼失去动画,因此需要先对其进行bake才可以顺利导出动画。
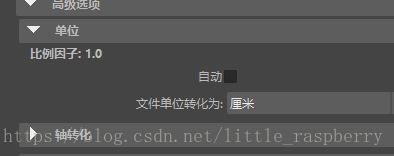
2.模型的单位问题。UE4 中模型的单位是cm,因此在导出FBX时讲导出设置的距离改为cm.
- 对论文的理解。
- 利用weight,space,time,shape四个因素来分析评估动作。
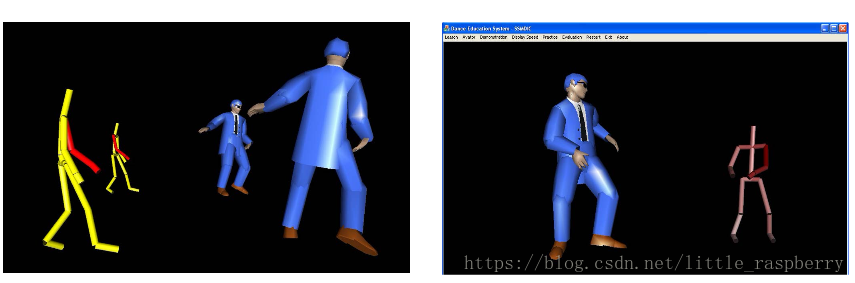
- 主要的学习模式有:视频、3D动画、文本描述。
- 通过判断两个关节之间的马氏距离来进行相似度的判定。马马氏距离表示数据的协方差距离,是用来计算两个未知样本集的相似度的方法,和欧式距离不同,它考虑了各种特性之间的关系,比如一个子关节是受其父关节影响的。公式为:
,其中μ为数据的均值,Σ为协方差矩阵。
- 将人用圆柱体骨骼表示出来。通过各个圆柱体的颜色表示匹配的程度。红色表示没有匹配上。
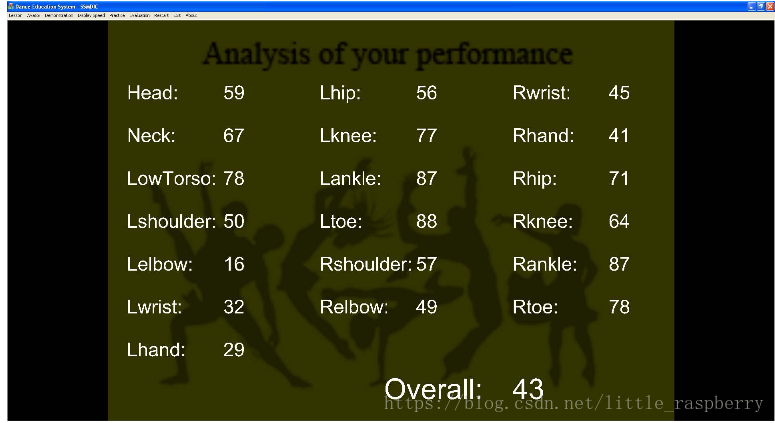
- 对于评分系统。计算每个关节的得分,最后在通过加权得到一个最终的得分。
以上就是第一周的工作内容。周日会展开进度讨论会。安排下周的具体工作。